#include <joint_limits_interface.h>
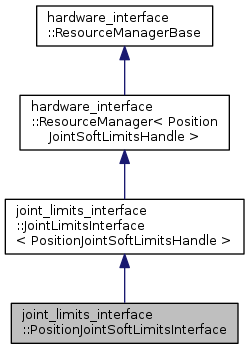
Inheritance diagram for joint_limits_interface::PositionJointSoftLimitsInterface:
Public Member Functions | |
Real-Time Safe Functions | |
| void | reset () |
| Reset all managed handles. More... | |
 Public Member Functions inherited from joint_limits_interface::JointLimitsInterface< PositionJointSoftLimitsHandle > Public Member Functions inherited from joint_limits_interface::JointLimitsInterface< PositionJointSoftLimitsHandle > | |
| PositionJointSoftLimitsHandle | getHandle (const std::string &name) |
| void | enforceLimits (const ros::Duration &period) |
| Enforce limits for all managed handles. More... | |
| Public Member Functions inherited from hardware_interface::ResourceManager< PositionJointSoftLimitsHandle > | |
| PositionJointSoftLimitsHandle | getHandle (const std::string &name) |
| std::vector< std::string > | getNames () const |
| void | registerHandle (const PositionJointSoftLimitsHandle &handle) |
| virtual | ~ResourceManager () |
| Public Member Functions inherited from hardware_interface::ResourceManagerBase | |
| virtual | ~ResourceManagerBase () |
Additional Inherited Members | |
| Public Types inherited from hardware_interface::ResourceManager< PositionJointSoftLimitsHandle > | |
| typedef ResourceManager< PositionJointSoftLimitsHandle > | resource_manager_type |
| Static Public Member Functions inherited from hardware_interface::ResourceManager< PositionJointSoftLimitsHandle > | |
| static void | concatManagers (std::vector< resource_manager_type * > &managers, resource_manager_type *result) |
| Protected Types inherited from hardware_interface::ResourceManager< PositionJointSoftLimitsHandle > | |
| typedef std::map< std::string, PositionJointSoftLimitsHandle > | ResourceMap |
| Protected Attributes inherited from hardware_interface::ResourceManager< PositionJointSoftLimitsHandle > | |
| ResourceMap | resource_map_ |
Detailed Description
Interface for enforcing limits on a position-controlled joint with soft position limits.
Definition at line 584 of file joint_limits_interface.h.
Member Function Documentation
|
inline |
Reset all managed handles.
Definition at line 589 of file joint_limits_interface.h.
The documentation for this class was generated from the following file: