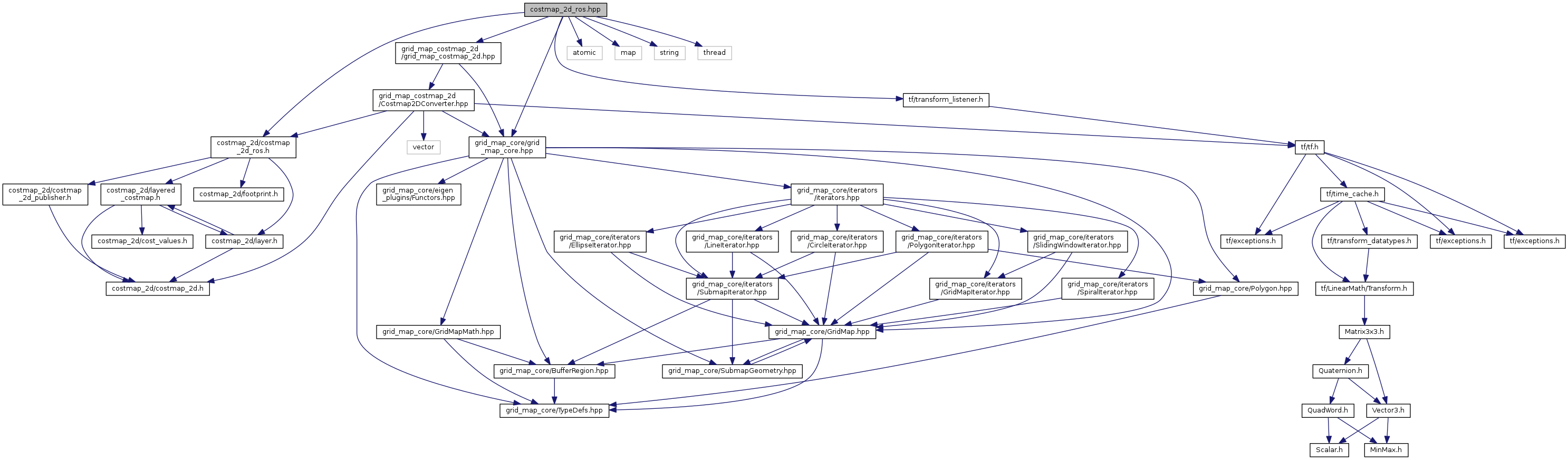
#include <costmap_2d/costmap_2d_ros.h>#include <grid_map_core/grid_map_core.hpp>#include <grid_map_costmap_2d/grid_map_costmap_2d.hpp>#include <tf/transform_listener.h>#include <atomic>#include <map>#include <string>#include <thread>
Include dependency graph for costmap_2d_ros.hpp:
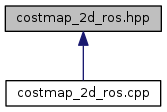
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | ROSCostmapServer |
| class | TransformBroadcaster |
| Broadcast a set of transforms useful for various demos. More... | |
Functions | |
| void | broadcastCostmap2DROSTestSuiteTransforms (TransformBroadcaster &broadcaster) |
Function Documentation
| void broadcastCostmap2DROSTestSuiteTransforms | ( | TransformBroadcaster & | broadcaster | ) |
Broadcast a set of transform useful for the suite of Costmap2DROS converter demos and tests
- Parameters
-
[in] broadcaster : uninitialised broadcaster object
Definition at line 23 of file costmap_2d_ros.cpp.