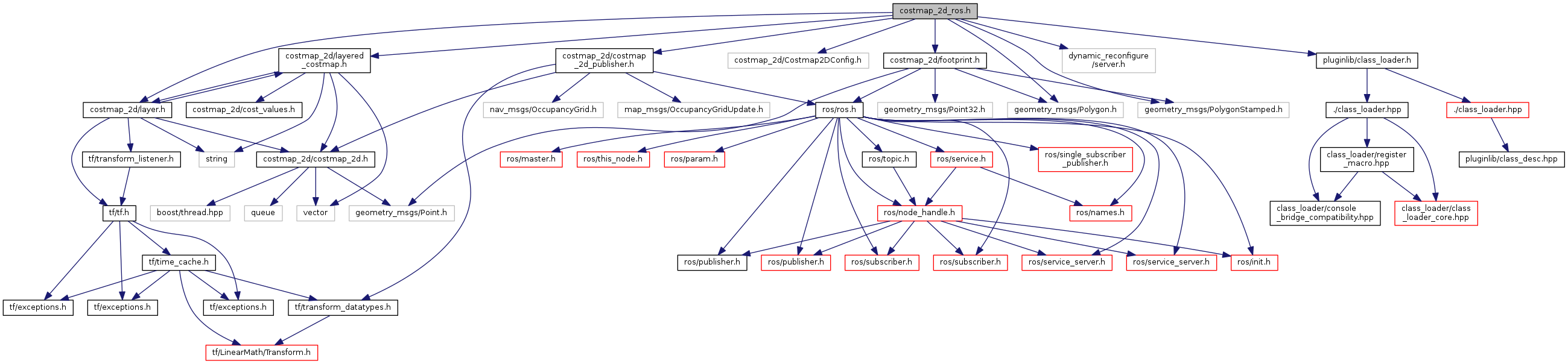
#include <costmap_2d/layered_costmap.h>#include <costmap_2d/layer.h>#include <costmap_2d/costmap_2d_publisher.h>#include <costmap_2d/Costmap2DConfig.h>#include <costmap_2d/footprint.h>#include <geometry_msgs/Polygon.h>#include <geometry_msgs/PolygonStamped.h>#include <dynamic_reconfigure/server.h>#include <pluginlib/class_loader.h>
Include dependency graph for costmap_2d_ros.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | costmap_2d::Costmap2DROS |
| A ROS wrapper for a 2D Costmap. Handles subscribing to topics that provide observations about obstacles in either the form of PointCloud or LaserScan messages. More... | |
| class | SuperValue |
Namespaces | |
| costmap_2d | |