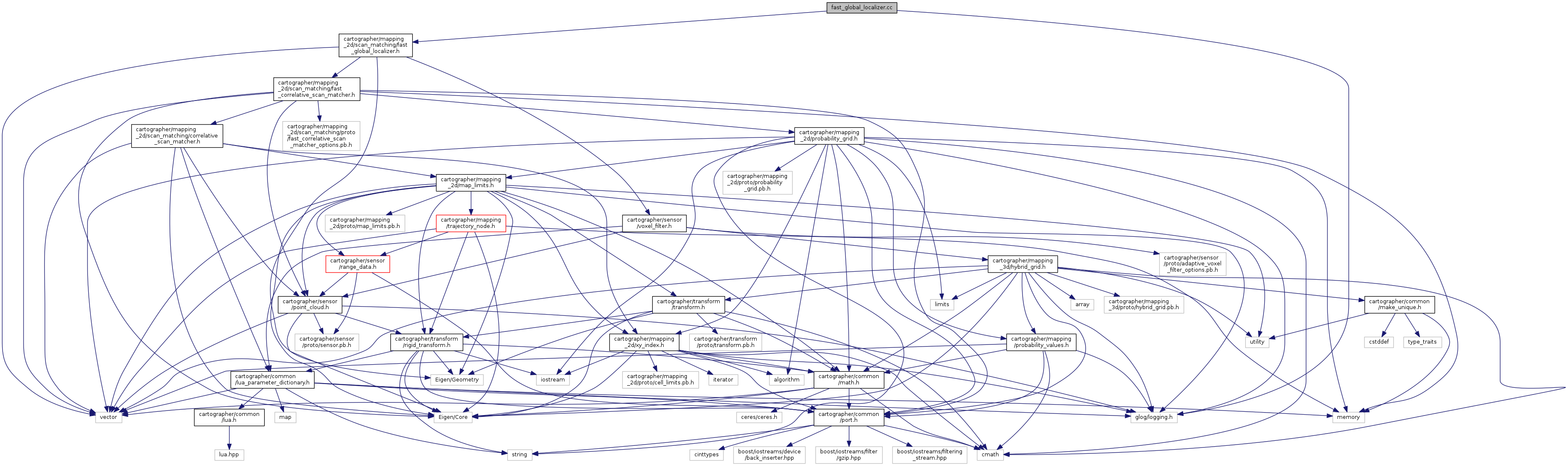
Include dependency graph for fast_global_localizer.cc:
Go to the source code of this file.
Namespaces | |
| cartographer | |
| cartographer::mapping_2d | |
| cartographer::mapping_2d::scan_matching | |
Functions | |
| bool | cartographer::mapping_2d::scan_matching::PerformGlobalLocalization (const float cutoff, const cartographer::sensor::AdaptiveVoxelFilter &voxel_filter, const std::vector< cartographer::mapping_2d::scan_matching::FastCorrelativeScanMatcher * > &matchers, const cartographer::sensor::PointCloud &point_cloud, transform::Rigid2d *const best_pose_estimate, float *const best_score) |