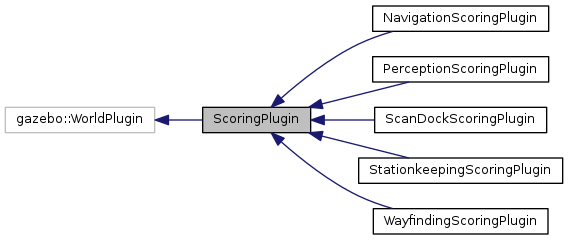
A plugin that provides common functionality to any scoring plugin. This plugin defines four different task states: More...
#include <scoring_plugin.hh>
Public Member Functions | |
| void | Exit () |
| Shutdown Gazebo and ROS. More... | |
| ScoringPlugin () | |
| Class constructor. More... | |
Protected Member Functions | |
| gazebo::common::Time | ElapsedTime () const |
| Elapsed time in the running state. More... | |
| void | Finish () |
| Finish the current task. This will set the "finished" flag in the task message to true. More... | |
| double | GetRunningStateDuration () |
| Get running duration. More... | |
| double | GetTimeoutScore () |
| Get the timeoutScore. More... | |
| void | Load (gazebo::physics::WorldPtr _world, sdf::ElementPtr _sdf) |
| virtual void | ReleaseVehicle () |
| Tries to release the vehicle in case is locked. More... | |
| gazebo::common::Time | RemainingTime () const |
| Remaining time in the running state. More... | |
| double | Score () const |
| Get the current score. More... | |
| void | SetScore (double _newScore) |
| Set the score. More... | |
| void | SetTimeoutScore (double _timeoutScore) |
| Set the score in case of timeout. More... | |
| std::string | TaskName () const |
| Get the task name. More... | |
| std::string | TaskState () const |
| Get the task state. More... | |
Protected Attributes | |
| gazebo::common::Time | lastCollisionTime |
| Last collision time. More... | |
| double | runningStateDuration = 300.0 |
| Duration (seconds) of the running state (max task time). More... | |
| vrx_gazebo::Task | taskMsg |
| The next task message to be published. More... | |
| std::string | taskName = "undefined" |
| The name of the task. More... | |
| ros::Publisher | taskPub |
| Publisher for the task state. More... | |
| gazebo::physics::ModelPtr | vehicleModel |
| Pointer to the vehicle to score. More... | |
| std::string | vehicleName |
| The name of the vehicle to score. More... | |
| gazebo::physics::WorldPtr | world |
| A world pointer. More... | |
Private Member Functions | |
| virtual void | OnCollision () |
| Callback executed when a collision is detected for the WAMV. More... | |
| void | OnCollisionMsg (ConstContactsPtr &_contacts) |
| Callback function when collision occurs in the world. More... | |
| virtual void | OnFinished () |
| Callback executed when the task state transition into "finished". More... | |
| virtual void | OnReady () |
| Callback executed when the task state transition into "ready". More... | |
| virtual void | OnRunning () |
| Callback executed when the task state transition into "running". More... | |
| bool | ParseJoints () |
| Parse the joints section of the SDF block. More... | |
| bool | ParseSDFParameters () |
| Parse all SDF parameters. More... | |
| void | PublishStats () |
| Publish the task stats over a ROS topic. More... | |
| void | Update () |
| Callback executed at every world update. More... | |
| void | UpdateTaskMessage () |
| Update the task stats message. More... | |
| void | UpdateTaskState () |
| Update the state of the current task. More... | |
| void | UpdateTime () |
| Update all time-related variables. More... | |
Private Attributes | |
| float | CollisionBuffer = 3.0 |
| Collision buffer. More... | |
| int | collisionCounter = 0 |
| Collisions counter. More... | |
| std::vector< std::string > | collisionList |
| Collision list. More... | |
| gazebo::transport::SubscriberPtr | collisionSub |
| Collision detection node subscriber. More... | |
| std::vector< gazebo::common::Time > | collisionTimestamps |
| Collisions timestamps. More... | |
| std::string | contactDebugTopic = "/vrx/debug/contact" |
| Topic where debug collision is published. More... | |
| vrx_gazebo::Contact | contactMsg |
| ROS Contact Msg. More... | |
| ros::Publisher | contactPub |
| Publisher for the collision. More... | |
| gazebo::common::Time | currentTime |
| Current time (simulation). More... | |
| bool | debug = true |
| Bool flag for debug. More... | |
| gazebo::common::Time | elapsedTime |
| gazebo::common::Time | finishTime |
| Absolute time specifying the start of the finish state. More... | |
| gazebo::transport::NodePtr | gzNode |
| gazebo node pointer More... | |
| double | initialStateDuration = 30.0 |
| Duration (seconds) of the initial state. More... | |
| gazebo::common::Time | lastStatsSent = gazebo::common::Time::Zero |
| Time at which the last message was sent. More... | |
| std::vector< std::string > | lockJointNames |
| The name of the joints to be dettached during ReleaseVehicle(). More... | |
| double | readyStateDuration = 60.0 |
| Duration (seconds) of the ready state. More... | |
| gazebo::common::Time | readyTime |
| Absolute time specifying the start of the ready state. More... | |
| gazebo::common::Time | remainingTime |
| Remaining time since the start of the task (running state). More... | |
| std::unique_ptr< ros::NodeHandle > | rosNode |
| ROS node handle. More... | |
| gazebo::common::Time | runningTime |
| Absolute time specifying the start of the running state. More... | |
| double | score = 0.0 |
| The score. More... | |
| sdf::ElementPtr | sdf |
| Pointer to the SDF plugin element. More... | |
| gazebo::transport::PublisherPtr | serverControlPub |
| gazebo server control publisher More... | |
| std::string | taskInfoTopic = "/vrx/task/info" |
| Topic where the task stats are published. More... | |
| std::string | taskState = "initial" |
| The task state. More... | |
| bool | timedOut = false |
| Whether the current task has timed out or not. More... | |
| double | timeoutScore = -1.0 |
| Score in case of timeout - added for Navigation task. More... | |
| gazebo::event::ConnectionPtr | updateConnection |
| Pointer to the update event connection. More... | |
Detailed Description
A plugin that provides common functionality to any scoring plugin. This plugin defines four different task states:
- Initial: The vehicle might be locked to the world via some joints with different constraints. This state is used to stabilize the vehicle and let it settle for a while.
- Ready: If the vehicle was locked, it will be released in this state. The task hasn't started yet, but the vehicle can be controlled and prepared for the start of the task.
- Running: The task has started. The clockwatch task starts too.
- Finished: The maximum allowed task time has been reached (time out) or the task has been completed. Other plugins derived from the ScoringPlugin class can call the Finish() method to trigger the completion of the task.
The plugin also exposes a pair of methods [Set]Score() for setting and getting a score.
Derived plugins can also override the OnReady(), OnRunning(), and OnFinished() to be notified when the task transitions into the "ready". "running" or "finished" states respectively.
The plugin publishes task information on a ROS topic at 1Hz.
This plugin uses the following SDF parameters:
<vehicle>: Required parameter (string type) with the name of the main vehicle to be under control during the task.
<task_name>: Required parameter specifying the task name (string type).
<task_info_topic>: Optional parameter (string type) containing the ROS topic name to publish the task stats. The default topic name is /vrx/task/info .
<contact_debug_topic>: Optional parameter (string type) containing the ROS topic name to publish every instant a collision with the wamv is happening. Default is /vrx/debug/contact.
<initial_state_duration>: Optional parameter (double type) specifying the amount of seconds that the plugin will be in the "initial" state.
<ready_state_duration>: Optional parameter (double type) specifying the amount of seconds that the plugin will be in the "ready" state.
<running_state_duration>: Optional parameter (double type) specifying the amount of maximum seconds that the plugin will be in the "running" state. Note that this parameter specifies the maximum task time.
<collision_buffer>: Optional parameter (double type) specifying the minimum amount of seconds between two collisions. If N collisions happen within this time frame, only one will be counted.
<release_joints>: Optional element specifying the collection of joints that should be dettached when transitioning to the "ready" state.
This block should contain at least one of these blocks: <joint>: This block should contain a <name> element with the name of the joint to release.
Here's an example: <plugin name="scoring_plugin" filename="libscoring_plugin.so"> <vehicle>wamv</vehicle> <task_name>navigation_course</task_name> <initial_state_duration>10</initial_state_duration> <ready_state_duration>10</ready_state_duration> <running_state_duration>30</running_state_duration> <release_joints> <joint> <name>wamv_external_pivot_joint</name> </joint> <joint> <name>wamv_external_riser</name> </joint> </release_joints> </plugin>
Definition at line 113 of file scoring_plugin.hh.
Constructor & Destructor Documentation
| ScoringPlugin::ScoringPlugin | ( | ) |
Class constructor.
Definition at line 25 of file scoring_plugin.cc.
Member Function Documentation
|
protected |
Elapsed time in the running state.
- Returns
- The elapsed time in the running state.
Definition at line 117 of file scoring_plugin.cc.
| void ScoringPlugin::Exit | ( | ) |
Shutdown Gazebo and ROS.
Definition at line 438 of file scoring_plugin.cc.
|
protected |
Finish the current task. This will set the "finished" flag in the task message to true.
Definition at line 129 of file scoring_plugin.cc.
|
protected |
Get running duration.
Definition at line 474 of file scoring_plugin.cc.
|
protected |
Get the timeoutScore.
Definition at line 469 of file scoring_plugin.cc.
|
protected |
Definition at line 29 of file scoring_plugin.cc.
|
privatevirtual |
Callback executed when a collision is detected for the WAMV.
Reimplemented in NavigationScoringPlugin.
Definition at line 270 of file scoring_plugin.cc.
|
private |
Callback function when collision occurs in the world.
- Parameters
-
[in] _contacts List of all collisions from last simulation iteration
Definition at line 275 of file scoring_plugin.cc.
|
privatevirtual |
Callback executed when the task state transition into "finished".
Definition at line 256 of file scoring_plugin.cc.
|
privatevirtual |
Callback executed when the task state transition into "ready".
Reimplemented in ScanDockScoringPlugin, WayfindingScoringPlugin, and StationkeepingScoringPlugin.
Definition at line 244 of file scoring_plugin.cc.
|
privatevirtual |
Callback executed when the task state transition into "running".
Reimplemented in ScanDockScoringPlugin, PerceptionScoringPlugin, WayfindingScoringPlugin, and StationkeepingScoringPlugin.
Definition at line 250 of file scoring_plugin.cc.
|
private |
Parse the joints section of the SDF block.
- Returns
- True when all parameters were successfully parsed or false otherwise.
Definition at line 401 of file scoring_plugin.cc.
|
private |
Parse all SDF parameters.
- Returns
- True when all parameters were successfully parsed or false otherwise.
Definition at line 324 of file scoring_plugin.cc.
|
private |
Publish the task stats over a ROS topic.
Definition at line 211 of file scoring_plugin.cc.
|
protectedvirtual |
Tries to release the vehicle in case is locked.
Reimplemented in PerceptionScoringPlugin.
Definition at line 224 of file scoring_plugin.cc.
|
protected |
Remaining time in the running state.
- Returns
- The remaining time in the running state.
Definition at line 123 of file scoring_plugin.cc.
|
protected |
|
protected |
Set the score.
- Parameters
-
[in] _newScore The new score.
Definition at line 98 of file scoring_plugin.cc.
|
protected |
Set the score in case of timeout.
Definition at line 464 of file scoring_plugin.cc.
|
protected |
|
protected |
|
private |
Callback executed at every world update.
Definition at line 139 of file scoring_plugin.cc.
|
private |
Update the task stats message.
Definition at line 201 of file scoring_plugin.cc.
|
private |
Update the state of the current task.
Definition at line 173 of file scoring_plugin.cc.
|
private |
Update all time-related variables.
Definition at line 156 of file scoring_plugin.cc.
Member Data Documentation
|
private |
Collision buffer.
Definition at line 276 of file scoring_plugin.hh.
|
private |
Collisions counter.
Definition at line 279 of file scoring_plugin.hh.
|
private |
Collision list.
Definition at line 282 of file scoring_plugin.hh.
|
private |
Collision detection node subscriber.
Definition at line 225 of file scoring_plugin.hh.
|
private |
Collisions timestamps.
Definition at line 285 of file scoring_plugin.hh.
|
private |
Topic where debug collision is published.
Definition at line 240 of file scoring_plugin.hh.
|
private |
ROS Contact Msg.
Definition at line 300 of file scoring_plugin.hh.
|
private |
Publisher for the collision.
Definition at line 312 of file scoring_plugin.hh.
|
private |
Current time (simulation).
Definition at line 267 of file scoring_plugin.hh.
|
private |
Bool flag for debug.
Definition at line 237 of file scoring_plugin.hh.
|
private |
Definition at line 270 of file scoring_plugin.hh.
|
private |
Absolute time specifying the start of the finish state.
Definition at line 264 of file scoring_plugin.hh.
|
private |
gazebo node pointer
Definition at line 222 of file scoring_plugin.hh.
|
private |
Duration (seconds) of the initial state.
Definition at line 249 of file scoring_plugin.hh.
|
protected |
Last collision time.
Definition at line 219 of file scoring_plugin.hh.
|
private |
Time at which the last message was sent.
Definition at line 291 of file scoring_plugin.hh.
|
private |
The name of the joints to be dettached during ReleaseVehicle().
Definition at line 303 of file scoring_plugin.hh.
|
private |
Duration (seconds) of the ready state.
Definition at line 252 of file scoring_plugin.hh.
|
private |
Absolute time specifying the start of the ready state.
Definition at line 258 of file scoring_plugin.hh.
|
private |
Remaining time since the start of the task (running state).
Definition at line 273 of file scoring_plugin.hh.
|
private |
ROS node handle.
Definition at line 306 of file scoring_plugin.hh.
|
protected |
Duration (seconds) of the running state (max task time).
Definition at line 255 of file scoring_plugin.hh.
|
private |
Absolute time specifying the start of the running state.
Definition at line 261 of file scoring_plugin.hh.
|
private |
The score.
Definition at line 243 of file scoring_plugin.hh.
|
private |
Pointer to the SDF plugin element.
Definition at line 246 of file scoring_plugin.hh.
|
private |
gazebo server control publisher
Definition at line 228 of file scoring_plugin.hh.
|
private |
Topic where the task stats are published.
Definition at line 234 of file scoring_plugin.hh.
|
protected |
The next task message to be published.
Definition at line 297 of file scoring_plugin.hh.
|
protected |
The name of the task.
Definition at line 210 of file scoring_plugin.hh.
|
protected |
Publisher for the task state.
Definition at line 309 of file scoring_plugin.hh.
|
private |
The task state.
Definition at line 294 of file scoring_plugin.hh.
|
private |
Whether the current task has timed out or not.
Definition at line 288 of file scoring_plugin.hh.
|
private |
Score in case of timeout - added for Navigation task.
Definition at line 315 of file scoring_plugin.hh.
|
private |
Pointer to the update event connection.
Definition at line 231 of file scoring_plugin.hh.
|
protected |
Pointer to the vehicle to score.
Definition at line 216 of file scoring_plugin.hh.
|
protected |
The name of the vehicle to score.
Definition at line 213 of file scoring_plugin.hh.
|
protected |
A world pointer.
Definition at line 207 of file scoring_plugin.hh.
The documentation for this class was generated from the following files: