Defines some interfaces for Scan Matchers. There are class GridScanMatcherObserver, ScanCostEstimator, GridScanMatcher. More...
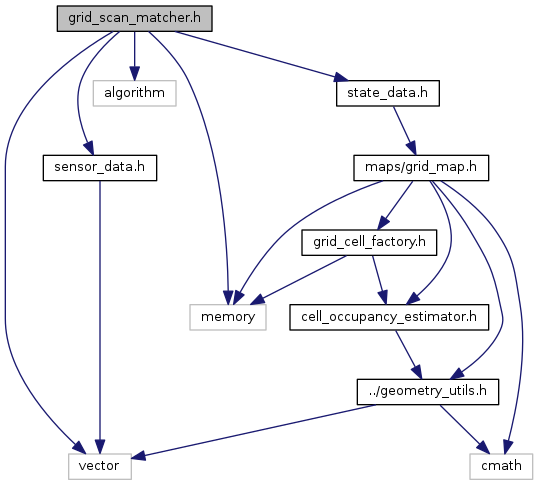
#include <vector>#include <memory>#include <algorithm>#include "state_data.h"#include "sensor_data.h"
Include dependency graph for grid_scan_matcher.h:
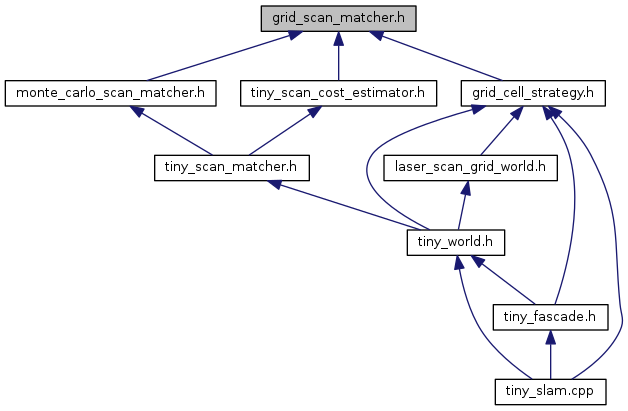
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | GridScanMatcher |
| Class that matches scans. Performes a scan adjustment by altering a robot pose in order to maximize the correspondence between a scan and a grid map; the rule of correspondence computation is defined in ScanCostEstimator subclasses. More... | |
| class | GridScanMatcherObserver |
| Interface of scan matcher observer. More... | |
| class | ScanCostEstimator |
| Interface of Estimator of Scan Cost. Cost - is a number that complies to a scan; the lower cost the better scan. More... | |
Detailed Description
Defines some interfaces for Scan Matchers. There are class GridScanMatcherObserver, ScanCostEstimator, GridScanMatcher.
Definition in file grid_scan_matcher.h.