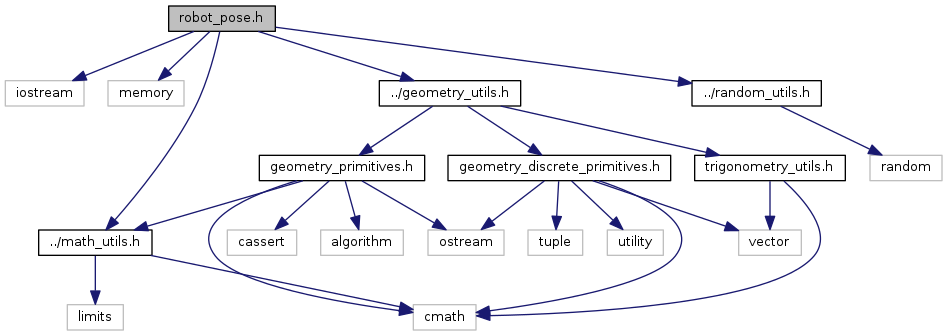
#include <iostream>#include <memory>#include "../math_utils.h"#include "../random_utils.h"#include "../geometry_utils.h"
Include dependency graph for robot_pose.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | RobotPose |
| class | RobotPoseDelta |
| class | RobotPoseDeltaRV< RandomEngineT > |
Macros | |
| #define | LESS_ABS(comp) (std::fabs(comp) < std::fabs(that.comp)) |
Functions | |
| std::ostream & | operator<< (std::ostream &os, const RobotPoseDelta &rpd) |
| std::ostream & | operator<< (std::ostream &os, const RobotPose &rp) |
Macro Definition Documentation
| #define LESS_ABS | ( | comp | ) | (std::fabs(comp) < std::fabs(that.comp)) |
Function Documentation
|
inline |
Definition at line 54 of file robot_pose.h.
|
inline |
Definition at line 134 of file robot_pose.h.