|
| void | cleanupHook () |
| |
| bool | configureHook () |
| |
| | RTT_TF (std::string const &name) |
| |
| bool | startHook () |
| |
| void | stopHook () |
| |
| void | updateHook () |
| |
| bool | addAttribute (const std::string &name, T &attr) |
| |
| bool | addAttribute (base::AttributeBase &a) |
| |
| bool | addAttribute (base::AttributeBase &a) |
| |
| bool | addAttribute (const std::string &name, T &attr) |
| |
| bool | addConstant (const std::string &name, const T &attr) |
| |
| bool | addConstant (const std::string &name, const T &attr) |
| |
| base::InputPortInterface & | addEventPort (const std::string &name, base::InputPortInterface &port, SlotFunction callback=SlotFunction()) |
| |
| base::InputPortInterface & | addEventPort (base::InputPortInterface &port, SlotFunction callback=SlotFunction()) |
| |
| Operation< Signature > & | addOperation (Operation< Signature > &op) |
| |
| Operation< Signature > & | addOperation (Operation< Signature > &op) |
| |
| Operation< typename internal::GetSignature< Func >::Signature > & | addOperation (const std::string name, Func func, Service *serv, ExecutionThread et=ClientThread) |
| |
| Operation< Signature > & | addOperation (const std::string name, Signature *func, ExecutionThread et=ClientThread) |
| |
| Operation< typename internal::GetSignature< Func >::Signature > & | addOperation (const std::string name, Func func, Service *serv, ExecutionThread et=ClientThread) |
| |
| Operation< Signature > & | addOperation (const std::string name, Signature *func, ExecutionThread et=ClientThread) |
| |
| virtual bool | addPeer (TaskContext *peer, std::string alias="") |
| |
| virtual bool | addPeer (TaskContext *peer, std::string alias="") |
| |
| base::PortInterface & | addPort (const std::string &name, base::PortInterface &port) |
| |
| base::PortInterface & | addPort (base::PortInterface &port) |
| |
| Property< T > & | addProperty (const std::string &name, T &attr) |
| |
| bool | addProperty (base::PropertyBase &pb) |
| |
| Property< T > & | addProperty (const std::string &name, T &attr) |
| |
| bool | addProperty (base::PropertyBase &pb) |
| |
| ConfigurationInterface * | attributes () |
| |
| ConfigurationInterface * | attributes () |
| |
| virtual void | clear () |
| |
| virtual bool | connectPeers (TaskContext *peer) |
| |
| virtual bool | connectPeers (TaskContext *peer) |
| |
| virtual bool | connectPorts (TaskContext *peer) |
| |
| virtual bool | connectServices (TaskContext *peer) |
| |
| virtual bool | connectServices (TaskContext *peer) |
| |
| virtual void | disconnect () |
| |
| virtual void | disconnect () |
| |
| virtual void | disconnectPeers (const std::string &name) |
| |
| virtual void | disconnectPeers (const std::string &name) |
| |
| base::ActivityInterface * | getActivity () |
| |
| T * | getActivity () |
| |
| base::AttributeBase * | getAttribute (const std::string &name) const |
| |
| base::AttributeBase * | getAttribute (const std::string &name) const |
| |
| virtual const std::string & | getName () const |
| |
| OperationInterfacePart * | getOperation (std::string name) |
| |
| OperationInterfacePart * | getOperation (std::string name) |
| |
| virtual TaskContext * | getPeer (const std::string &peer_name) const |
| |
| virtual TaskContext * | getPeer (const std::string &peer_name) const |
| |
| virtual PeerList | getPeerList () const |
| |
| virtual PeerList | getPeerList () const |
| |
| base::PortInterface * | getPort (const std::string &name) const |
| |
| base::PropertyBase * | getProperty (const std::string &name) const |
| |
| base::PropertyBase * | getProperty (const std::string &name) const |
| |
| boost::shared_ptr< ServiceType > | getProvider (const std::string &name) |
| |
| boost::shared_ptr< ServiceType > | getProvider (const std::string &name) |
| |
| virtual bool | hasPeer (const std::string &peer_name) const |
| |
| virtual bool | hasPeer (const std::string &peer_name) const |
| |
| bool | loadService (const std::string &service_name) |
| |
| bool | loadService (const std::string &service_name) |
| |
| OperationInterface * | operations () |
| |
| OperationInterface * | operations () |
| |
| DataFlowInterface * | ports () |
| |
| const DataFlowInterface * | ports () const |
| |
| PropertyBag * | properties () |
| |
| PropertyBag * | properties () |
| |
| Service::shared_ptr | provides (const std::string &service_name) |
| |
| Service::shared_ptr | provides () |
| |
| Service::shared_ptr | provides () |
| |
| Service::shared_ptr | provides (const std::string &service_name) |
| |
| virtual bool | ready () |
| |
| virtual void | removePeer (const std::string &name) |
| |
| virtual void | removePeer (TaskContext *peer) |
| |
| virtual void | removePeer (TaskContext *peer) |
| |
| virtual void | removePeer (const std::string &name) |
| |
| ServiceRequester::shared_ptr | requires (const std::string &service_name) |
| |
| ServiceRequester::shared_ptr | requires (const std::string &service_name) |
| |
| ServiceRequester::shared_ptr | requires () |
| |
| ServiceRequester::shared_ptr | requires () |
| |
| bool | setActivity (base::ActivityInterface *new_act) |
| |
| virtual bool | start () |
| |
| virtual bool | stop () |
| |
| | TaskContext (const std::string &name, TaskState initial_state=Stopped) |
| |
| virtual | ~TaskContext () |
| |
| virtual bool | activate () |
| |
| virtual bool | activate () |
| |
| virtual bool | cleanup () |
| |
| virtual bool | cleanup () |
| |
| virtual bool | configure () |
| |
| virtual bool | configure () |
| |
| const ExecutionEngine * | engine () const |
| |
| ExecutionEngine * | engine () |
| |
| virtual void | error () |
| |
| virtual void | error () |
| |
| virtual unsigned | getCpuAffinity () const |
| |
| virtual unsigned | getCpuAffinity () const |
| |
| unsigned int | getCycleCounter () const |
| |
| unsigned int | getIOCounter () const |
| |
| virtual Seconds | getPeriod () const |
| |
| virtual Seconds | getPeriod () const |
| |
| virtual TaskState | getTargetState () const |
| |
| virtual TaskState | getTaskState () const |
| |
| unsigned int | getTimeOutCounter () const |
| |
| unsigned int | getTriggerCounter () const |
| |
| virtual bool | inException () const |
| |
| virtual bool | inException () const |
| |
| virtual bool | inFatalError () const |
| |
| virtual bool | inFatalError () const |
| |
| virtual bool | inRunTimeError () const |
| |
| virtual bool | inRunTimeError () const |
| |
| virtual bool | isActive () const |
| |
| virtual bool | isActive () const |
| |
| virtual bool | isConfigured () const |
| |
| virtual bool | isConfigured () const |
| |
| virtual bool | isRunning () const |
| |
| virtual bool | isRunning () const |
| |
| virtual bool | recover () |
| |
| virtual bool | recover () |
| |
| virtual bool | setCpuAffinity (unsigned cpu) |
| |
| virtual bool | setCpuAffinity (unsigned cpu) |
| |
| virtual bool | setPeriod (Seconds s) |
| |
| virtual bool | setPeriod (Seconds s) |
| |
| | TaskCore (TaskState initial_state=Stopped, const std::string &name=std::string()) |
| |
| virtual bool | trigger () |
| |
| virtual bool | trigger () |
| |
| virtual bool | update () |
| |
| virtual bool | update () |
| |
| virtual | ~TaskCore () |
| |
|
| void | addTFOperations (RTT::Service::shared_ptr service) |
| |
| void | broadcastStaticTransform (const geometry_msgs::TransformStamped &tform) |
| |
| void | broadcastStaticTransforms (const std::vector< geometry_msgs::TransformStamped > &tforms) |
| |
| void | broadcastTransform (const geometry_msgs::TransformStamped &tform) |
| |
| void | broadcastTransforms (const std::vector< geometry_msgs::TransformStamped > &tforms) |
| |
| bool | canTransform (const std::string &target, const std::string &source) const |
| |
| bool | canTransformAtTime (const std::string &target, const std::string &source, const ros::Time &common_time) const |
| |
| ros::Time | getLatestCommonTime (const std::string &target, const std::string &source) const |
| |
| void | internalUpdate (tf2_msgs::TFMessage &msg, RTT::InputPort< tf2_msgs::TFMessage > &port, bool is_static) |
| |
| void | listTrackers () |
| |
| geometry_msgs::TransformStamped | lookupTransform (const std::string &target, const std::string &source) const |
| |
| geometry_msgs::TransformStamped | lookupTransformAtTime (const std::string &target, const std::string &source, const ros::Time &common_time) const |
| |
| bool | subscribeTransfrom (const std::string &target, const std::string &source) |
| |
|
| typedef std::vector< std::string > | PeerList |
| |
| typedef boost::function< void(base::PortInterface *)> | SlotFunction |
| |
| enum | TaskState |
| |
| | Exception |
| |
| | FatalError |
| |
| | Init |
| |
| | PreOperational |
| |
| | Running |
| |
| | RunTimeError |
| |
| | Stopped |
| |
| typedef boost::function< void(TransformableRequestHandle request_handle, const std::string &target_frame, const std::string &source_frame, ros::Time time, TransformableResult result)> | TransformableCallback |
| |
| virtual void | dataOnPortCallback (base::PortInterface *port) |
| |
| virtual bool | dataOnPortHook (base::PortInterface *port) |
| |
| void | forceActivity (base::ActivityInterface *new_act) |
| |
| virtual bool | breakUpdateHook () |
| |
| virtual void | errorHook () |
| |
| virtual void | exception () |
| |
| virtual void | exceptionHook () |
| |
| virtual void | fatal () |
| |
| boost::signals2::connection | _addTransformsChangedListener (boost::function< void(void)> callback) |
| |
| std::string | _allFramesAsDot (double current_time) const |
| |
| std::string | _allFramesAsDot () const |
| |
| void | _chainAsVector (const std::string &target_frame, ros::Time target_time, const std::string &source_frame, ros::Time source_time, const std::string &fixed_frame, std::vector< std::string > &output) const |
| |
| bool | _frameExists (const std::string &frame_id_str) const |
| |
| void | _getFrameStrings (std::vector< std::string > &ids) const |
| |
| int | _getLatestCommonTime (CompactFrameID target_frame, CompactFrameID source_frame, ros::Time &time, std::string *error_string) const |
| |
| bool | _getParent (const std::string &frame_id, ros::Time time, std::string &parent) const |
| |
| CompactFrameID | _lookupFrameNumber (const std::string &frameid_str) const |
| |
| CompactFrameID | _lookupOrInsertFrameNumber (const std::string &frameid_str) |
| |
| void | _removeTransformsChangedListener (boost::signals2::connection c) |
| |
| CompactFrameID | _validateFrameId (const char *function_name_arg, const std::string &frame_id) const |
| |
| TransformableCallbackHandle | addTransformableCallback (const TransformableCallback &cb) |
| |
| TransformableRequestHandle | addTransformableRequest (TransformableCallbackHandle handle, const std::string &target_frame, const std::string &source_frame, ros::Time time) |
| |
| std::string | allFramesAsString () const |
| |
| std::string | allFramesAsYAML (double current_time) const |
| |
| std::string | allFramesAsYAML () const |
| |
| | BufferCore (ros::Duration cache_time_=ros::Duration(DEFAULT_CACHE_TIME)) |
| |
| void | cancelTransformableRequest (TransformableRequestHandle handle) |
| |
| bool | canTransform (const std::string &target_frame, const std::string &source_frame, const ros::Time &time, std::string *error_msg=NULL) const |
| |
| bool | canTransform (const std::string &target_frame, const ros::Time &target_time, const std::string &source_frame, const ros::Time &source_time, const std::string &fixed_frame, std::string *error_msg=NULL) const |
| |
| void | clear () |
| |
| ros::Duration | getCacheLength () |
| |
| bool | isUsingDedicatedThread () const |
| |
| geometry_msgs::TransformStamped | lookupTransform (const std::string &target_frame, const ros::Time &target_time, const std::string &source_frame, const ros::Time &source_time, const std::string &fixed_frame) const |
| |
| geometry_msgs::TransformStamped | lookupTransform (const std::string &target_frame, const std::string &source_frame, const ros::Time &time) const |
| |
| void | removeTransformableCallback (TransformableCallbackHandle handle) |
| |
| bool | setTransform (const geometry_msgs::TransformStamped &transform, const std::string &authority, bool is_static=false) |
| |
| void | setUsingDedicatedThread (bool value) |
| |
| virtual | ~BufferCore (void) |
| |
| ExecutionEngine * | ee |
| |
| unsigned int | mCycleCounter |
| |
| unsigned int | mIOCounter |
| |
| std::string | mName |
| |
| TaskState | mTaskState |
| |
| unsigned int | mTimeOutCounter |
| |
| unsigned int | mTriggerCounter |
| |
| bool | mTriggerOnStart |
| |
| static const int | DEFAULT_CACHE_TIME |
| |
| static const uint32_t | MAX_GRAPH_DEPTH |
| |
Definition at line 14 of file rtt_tf-component.hpp.
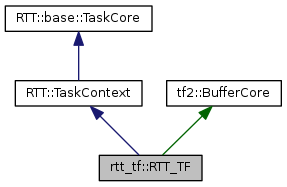
 Public Member Functions inherited from RTT::TaskContext
Public Member Functions inherited from RTT::TaskContext