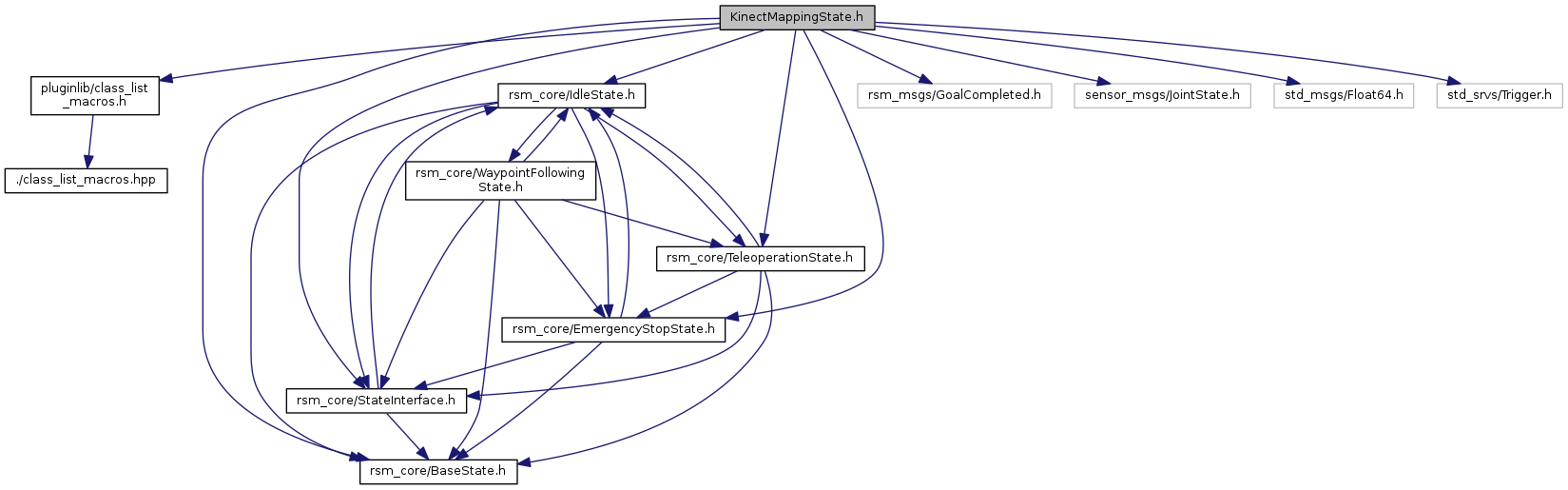
#include <pluginlib/class_list_macros.h>#include <rsm_core/BaseState.h>#include <rsm_core/IdleState.h>#include <rsm_core/EmergencyStopState.h>#include <rsm_core/TeleoperationState.h>#include <rsm_core/StateInterface.h>#include <rsm_msgs/GoalCompleted.h>#include <sensor_msgs/JointState.h>#include <std_msgs/Float64.h>#include <std_srvs/Trigger.h>
Include dependency graph for KinectMappingState.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | rsm::KinectMappingState |
| Dummy state for mapping at a reached goal during exploration. Only initiates transition to CalculateGoalState. More... | |
Namespaces | |
| rsm | |
Macros | |
| #define | KINECT_CENTER_POSITION 0.0 |
| #define | KINECT_LEFT_LIMIT 1.30 |
| #define | KINECT_RIGHT_LIMIT -1.30 |
| #define | MOVE_LEFT 0 |
| #define | MOVE_RIGHT 1 |
| #define | MOVE_TO_CENTER 2 |
| #define | POS_TOLERANCE 0.05 |
Macro Definition Documentation
| #define KINECT_CENTER_POSITION 0.0 |
Definition at line 21 of file KinectMappingState.h.
| #define KINECT_LEFT_LIMIT 1.30 |
Definition at line 19 of file KinectMappingState.h.
| #define KINECT_RIGHT_LIMIT -1.30 |
Definition at line 20 of file KinectMappingState.h.
| #define MOVE_LEFT 0 |
Definition at line 15 of file KinectMappingState.h.
| #define MOVE_RIGHT 1 |
Definition at line 16 of file KinectMappingState.h.
| #define MOVE_TO_CENTER 2 |
Definition at line 17 of file KinectMappingState.h.
| #define POS_TOLERANCE 0.05 |
Definition at line 23 of file KinectMappingState.h.