File containing the FramePoint<T> object definition. More...
#include "rdl_dynamics/FrameObject.hpp"#include "rdl_dynamics/FrameVector.hpp"#include "rdl_dynamics/Point3.hpp"#include "rdl_dynamics/FrameExceptions.hpp"
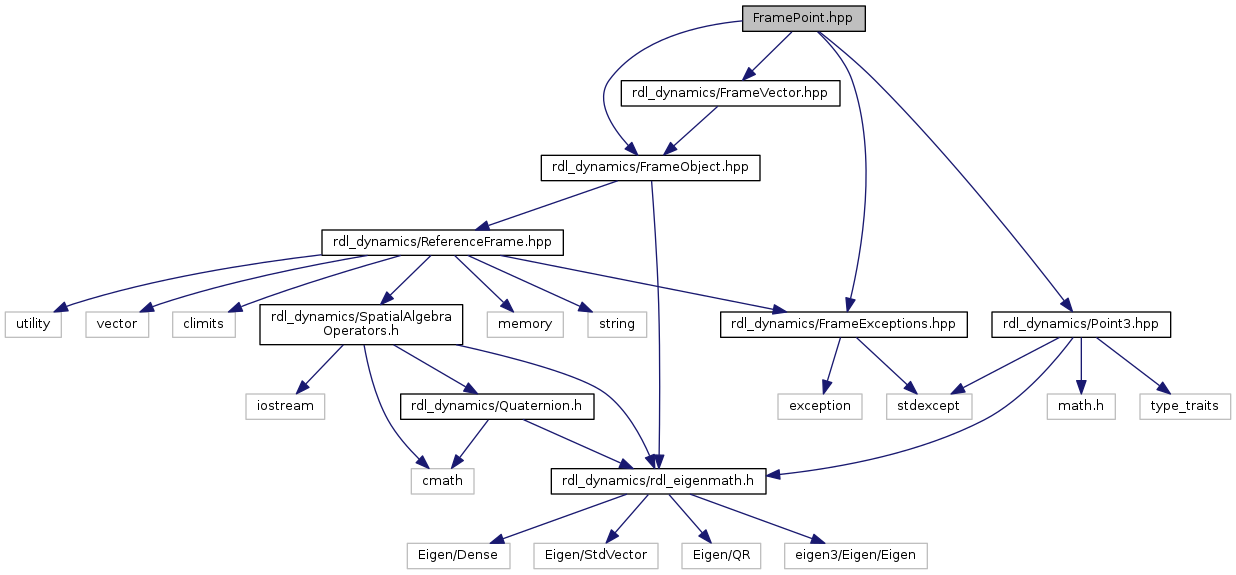
Include dependency graph for FramePoint.hpp:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | RobotDynamics::Math::FramePoint |
| A FramePoint is a 3D point that is expressed in a ReferenceFrame. To change the ReferenceFrame a FramePoint is expressed in, you may call the inhereted FrameObject::changeFrame method and supply it a pointer to the ReferenceFrame you wish to have the FramePoint expressed in. This class and its implementation are an adaptation of FramePoint.java by Jerry Pratt and the IHMC Robotics Group. More... | |
Namespaces | |
| RobotDynamics | |
| Namespace for all structures of the RobotDynamics library. | |
| RobotDynamics::Math | |
| Math types such as vectors and matrices and utility functions. | |
Typedefs | |
| typedef std::vector< FramePoint, Eigen::aligned_allocator< FramePoint > > | RobotDynamics::Math::FramePointV |
Functions | |
| bool | RobotDynamics::Math::operator!= (const FramePoint &lhs, const FramePoint &rhs) |
| Check if two FramePoints are not equal. More... | |
| template<typename T > | |
| FrameVector | RobotDynamics::Math::operator* (const T scale, FramePoint p) |
| template<typename T > | |
| FrameVector | RobotDynamics::Math::operator* (FramePoint p, const T scale) |
| FramePoint | RobotDynamics::Math::operator+ (FramePoint p, const FrameVector &v) |
| FramePoint | RobotDynamics::Math::operator- (FramePoint p, const FrameVector &v) |
| FrameVector | RobotDynamics::Math::operator- (FramePoint p1, const FramePoint &p2) |
| Subtract two FramePoints and return result in newly created FramePoint. More... | |
| std::ostream & | RobotDynamics::Math::operator<< (std::ostream &output, const FramePoint &framePoint) |
| bool | RobotDynamics::Math::operator== (const FramePoint &lhs, const FramePoint &rhs) |
| Check if two FramePoints are equal. More... | |
Detailed Description
File containing the FramePoint<T> object definition.
Definition in file FramePoint.hpp.