#include <op3_walking_module.h>
|
| void | computeArmAngle (double *arm_angle) |
| |
| bool | computeIK (double *out, double x, double y, double z, double a, double b, double c) |
| |
| bool | computeLegAngle (double *leg_angle) |
| |
| bool | getWalkigParameterCallback (op3_walking_module_msgs::GetWalkingParam::Request &req, op3_walking_module_msgs::GetWalkingParam::Response &res) |
| |
| void | iniPoseTraGene (double mov_time) |
| |
| void | loadWalkingParam (const std::string &path) |
| |
| void | processPhase (const double &time_unit) |
| |
| void | publishStatusMsg (unsigned int type, std::string msg) |
| |
| void | queueThread () |
| |
| void | saveWalkingParam (std::string &path) |
| |
| void | sensoryFeedback (const double &rlGyroErr, const double &fbGyroErr, double *balance_angle) |
| |
| void | startWalking () |
| |
| void | updateMovementParam () |
| |
| void | updatePoseParam () |
| |
| void | updateTimeParam () |
| |
| void | walkingCommandCallback (const std_msgs::String::ConstPtr &msg) |
| |
| void | walkingParameterCallback (const op3_walking_module_msgs::WalkingParam::ConstPtr &msg) |
| |
| double | wSin (double time, double period, double period_shift, double mag, double mag_shift) |
| |
Definition at line 61 of file op3_walking_module.h.
| Enumerator |
|---|
| WalkingDisable |
|
| WalkingEnable |
|
| WalkingInitPose |
|
| WalkingReady |
|
Definition at line 97 of file op3_walking_module.h.
| robotis_op::WalkingModule::WalkingModule |
( |
| ) |
|
| robotis_op::WalkingModule::~WalkingModule |
( |
| ) |
|
|
virtual |
| void robotis_op::WalkingModule::computeArmAngle |
( |
double * |
arm_angle | ) |
|
|
private |
| bool robotis_op::WalkingModule::computeIK |
( |
double * |
out, |
|
|
double |
x, |
|
|
double |
y, |
|
|
double |
z, |
|
|
double |
a, |
|
|
double |
b, |
|
|
double |
c |
|
) |
| |
|
private |
| bool robotis_op::WalkingModule::computeLegAngle |
( |
double * |
leg_angle | ) |
|
|
private |
| double robotis_op::WalkingModule::getBodySwingY |
( |
| ) |
|
|
inline |
| double robotis_op::WalkingModule::getBodySwingZ |
( |
| ) |
|
|
inline |
| int robotis_op::WalkingModule::getCurrentPhase |
( |
| ) |
|
|
inline |
| bool robotis_op::WalkingModule::getWalkigParameterCallback |
( |
op3_walking_module_msgs::GetWalkingParam::Request & |
req, |
|
|
op3_walking_module_msgs::GetWalkingParam::Response & |
res |
|
) |
| |
|
private |
| void robotis_op::WalkingModule::iniPoseTraGene |
( |
double |
mov_time | ) |
|
|
private |
| bool robotis_op::WalkingModule::isRunning |
( |
| ) |
|
|
virtual |
| void robotis_op::WalkingModule::loadWalkingParam |
( |
const std::string & |
path | ) |
|
|
private |
| void robotis_op::WalkingModule::onModuleDisable |
( |
| ) |
|
|
virtual |
| void robotis_op::WalkingModule::onModuleEnable |
( |
| ) |
|
|
virtual |
| void robotis_op::WalkingModule::process |
( |
std::map< std::string, robotis_framework::Dynamixel * > |
dxls, |
|
|
std::map< std::string, double > |
sensors |
|
) |
| |
|
virtual |
| void robotis_op::WalkingModule::processPhase |
( |
const double & |
time_unit | ) |
|
|
private |
| void robotis_op::WalkingModule::publishStatusMsg |
( |
unsigned int |
type, |
|
|
std::string |
msg |
|
) |
| |
|
private |
| void robotis_op::WalkingModule::queueThread |
( |
| ) |
|
|
private |
| void robotis_op::WalkingModule::saveWalkingParam |
( |
std::string & |
path | ) |
|
|
private |
| void robotis_op::WalkingModule::sensoryFeedback |
( |
const double & |
rlGyroErr, |
|
|
const double & |
fbGyroErr, |
|
|
double * |
balance_angle |
|
) |
| |
|
private |
| void robotis_op::WalkingModule::startWalking |
( |
| ) |
|
|
private |
| void robotis_op::WalkingModule::stop |
( |
| ) |
|
|
virtual |
| void robotis_op::WalkingModule::updateMovementParam |
( |
| ) |
|
|
private |
| void robotis_op::WalkingModule::updatePoseParam |
( |
| ) |
|
|
private |
| void robotis_op::WalkingModule::updateTimeParam |
( |
| ) |
|
|
private |
| void robotis_op::WalkingModule::walkingCommandCallback |
( |
const std_msgs::String::ConstPtr & |
msg | ) |
|
|
private |
| void robotis_op::WalkingModule::walkingParameterCallback |
( |
const op3_walking_module_msgs::WalkingParam::ConstPtr & |
msg | ) |
|
|
private |
| double robotis_op::WalkingModule::wSin |
( |
double |
time, |
|
|
double |
period, |
|
|
double |
period_shift, |
|
|
double |
mag, |
|
|
double |
mag_shift |
|
) |
| |
|
private |
| double robotis_op::WalkingModule::a_move_amplitude_ |
|
private |
| double robotis_op::WalkingModule::a_move_amplitude_shift_ |
|
private |
| double robotis_op::WalkingModule::a_move_period_time_ |
|
private |
| double robotis_op::WalkingModule::a_move_phase_shift_ |
|
private |
| double robotis_op::WalkingModule::a_offset_ |
|
private |
| double robotis_op::WalkingModule::arm_swing_gain_ |
|
private |
| double robotis_op::WalkingModule::body_swing_y |
|
private |
| double robotis_op::WalkingModule::body_swing_z |
|
private |
| Eigen::MatrixXd robotis_op::WalkingModule::calc_joint_tra_ |
|
private |
| int robotis_op::WalkingModule::control_cycle_msec_ |
|
private |
| bool robotis_op::WalkingModule::ctrl_running_ |
|
private |
| const bool robotis_op::WalkingModule::DEBUG |
|
private |
| double robotis_op::WalkingModule::dsp_ratio_ |
|
private |
| Eigen::MatrixXd robotis_op::WalkingModule::goal_position_ |
|
private |
| double robotis_op::WalkingModule::hit_pitch_offset_ |
|
private |
| int robotis_op::WalkingModule::init_pose_count_ |
|
private |
| Eigen::MatrixXd robotis_op::WalkingModule::init_position_ |
|
private |
| Eigen::MatrixXi robotis_op::WalkingModule::joint_axis_direction_ |
|
private |
| std::map<std::string, int> robotis_op::WalkingModule::joint_table_ |
|
private |
| double robotis_op::WalkingModule::l_ssp_end_time_ |
|
private |
| double robotis_op::WalkingModule::l_ssp_start_time_ |
|
private |
| double robotis_op::WalkingModule::p_offset_ |
|
private |
| std::string robotis_op::WalkingModule::param_path_ |
|
private |
| double robotis_op::WalkingModule::pelvis_offset_ |
|
private |
| double robotis_op::WalkingModule::pelvis_swing_ |
|
private |
| double robotis_op::WalkingModule::period_time_ |
|
private |
| double robotis_op::WalkingModule::phase1_time_ |
|
private |
| double robotis_op::WalkingModule::phase2_time_ |
|
private |
| double robotis_op::WalkingModule::phase3_time_ |
|
private |
| int robotis_op::WalkingModule::phase_ |
|
private |
| double robotis_op::WalkingModule::previous_x_move_amplitude_ |
|
private |
| boost::mutex robotis_op::WalkingModule::publish_mutex_ |
|
private |
| boost::thread robotis_op::WalkingModule::queue_thread_ |
|
private |
| double robotis_op::WalkingModule::r_offset_ |
|
private |
| double robotis_op::WalkingModule::r_ssp_end_time_ |
|
private |
| double robotis_op::WalkingModule::r_ssp_start_time_ |
|
private |
| bool robotis_op::WalkingModule::real_running_ |
|
private |
| double robotis_op::WalkingModule::ssp_ratio_ |
|
private |
| double robotis_op::WalkingModule::ssp_time_ |
|
private |
| Eigen::MatrixXd robotis_op::WalkingModule::target_position_ |
|
private |
| double robotis_op::WalkingModule::time_ |
|
private |
| op3_walking_module_msgs::WalkingParam robotis_op::WalkingModule::walking_param_ |
|
private |
| int robotis_op::WalkingModule::walking_state_ |
|
private |
| double robotis_op::WalkingModule::x_move_amplitude_ |
|
private |
| double robotis_op::WalkingModule::x_move_amplitude_shift_ |
|
private |
| double robotis_op::WalkingModule::x_move_period_time_ |
|
private |
| double robotis_op::WalkingModule::x_move_phase_shift_ |
|
private |
| double robotis_op::WalkingModule::x_offset_ |
|
private |
| double robotis_op::WalkingModule::x_swap_amplitude_ |
|
private |
| double robotis_op::WalkingModule::x_swap_amplitude_shift_ |
|
private |
| double robotis_op::WalkingModule::x_swap_period_time_ |
|
private |
| double robotis_op::WalkingModule::x_swap_phase_shift_ |
|
private |
| double robotis_op::WalkingModule::y_move_amplitude_ |
|
private |
| double robotis_op::WalkingModule::y_move_amplitude_shift_ |
|
private |
| double robotis_op::WalkingModule::y_move_period_time_ |
|
private |
| double robotis_op::WalkingModule::y_move_phase_shift_ |
|
private |
| double robotis_op::WalkingModule::y_offset_ |
|
private |
| double robotis_op::WalkingModule::y_swap_amplitude_ |
|
private |
| double robotis_op::WalkingModule::y_swap_amplitude_shift_ |
|
private |
| double robotis_op::WalkingModule::y_swap_period_time_ |
|
private |
| double robotis_op::WalkingModule::y_swap_phase_shift_ |
|
private |
| double robotis_op::WalkingModule::z_move_amplitude_ |
|
private |
| double robotis_op::WalkingModule::z_move_amplitude_shift_ |
|
private |
| double robotis_op::WalkingModule::z_move_period_time_ |
|
private |
| double robotis_op::WalkingModule::z_move_phase_shift_ |
|
private |
| double robotis_op::WalkingModule::z_offset_ |
|
private |
| double robotis_op::WalkingModule::z_swap_amplitude_ |
|
private |
| double robotis_op::WalkingModule::z_swap_amplitude_shift_ |
|
private |
| double robotis_op::WalkingModule::z_swap_period_time_ |
|
private |
| double robotis_op::WalkingModule::z_swap_phase_shift_ |
|
private |
The documentation for this class was generated from the following files:
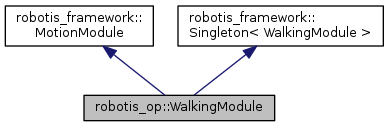
 Public Member Functions inherited from robotis_framework::MotionModule
Public Member Functions inherited from robotis_framework::MotionModule