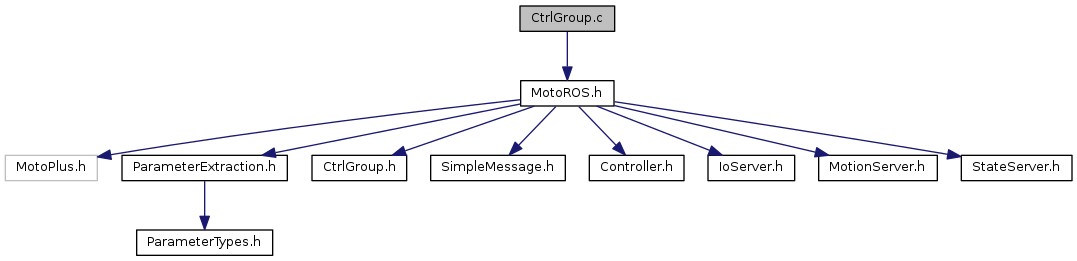
#include "MotoROS.h"
Include dependency graph for CtrlGroup.c:
Go to the source code of this file.
Functions | |
| void | Ros_CtrlGroup_ConvertToMotoPos (CtrlGroup *ctrlGroup, float radPos[MAX_PULSE_AXES], long motopulsePos[MAX_PULSE_AXES]) |
| void | Ros_CtrlGroup_ConvertToRosPos (CtrlGroup *ctrlGroup, long motopulsePos[MAX_PULSE_AXES], float rosPos[MAX_PULSE_AXES]) |
| CtrlGroup * | Ros_CtrlGroup_Create (int groupNo, BOOL bIsLastGrpToInit, float interpolPeriod) |
| MP_GRP_ID_TYPE | Ros_CtrlGroup_FindGrpId (int groupNo) |
| UCHAR | Ros_CtrlGroup_GetAxisConfig (CtrlGroup *ctrlGroup) |
| BOOL | Ros_CtrlGroup_GetFBPulsePos (CtrlGroup *ctrlGroup, long pulsePos[MAX_PULSE_AXES]) |
| BOOL | Ros_CtrlGroup_GetFBServoSpeed (CtrlGroup *ctrlGroup, long pulseSpeed[MAX_PULSE_AXES]) |
| BOOL | Ros_CtrlGroup_GetPulsePosCmd (CtrlGroup *ctrlGroup, long pulsePos[MAX_PULSE_AXES]) |
| BOOL | Ros_CtrlGroup_GetTorque (CtrlGroup *ctrlGroup, double torqueValues[MAX_PULSE_AXES]) |
| BOOL | Ros_CtrlGroup_IsRobot (CtrlGroup *ctrlGroup) |
Function Documentation
| void Ros_CtrlGroup_ConvertToMotoPos | ( | CtrlGroup * | ctrlGroup, |
| float | radPos[MAX_PULSE_AXES], | ||
| long | motopulsePos[MAX_PULSE_AXES] | ||
| ) |
Definition at line 548 of file CtrlGroup.c.
| void Ros_CtrlGroup_ConvertToRosPos | ( | CtrlGroup * | ctrlGroup, |
| long | motopulsePos[MAX_PULSE_AXES], | ||
| float | rosPos[MAX_PULSE_AXES] | ||
| ) |
Definition at line 479 of file CtrlGroup.c.
| CtrlGroup* Ros_CtrlGroup_Create | ( | int | groupNo, |
| BOOL | bIsLastGrpToInit, | ||
| float | interpolPeriod | ||
| ) |
Definition at line 59 of file CtrlGroup.c.
| MP_GRP_ID_TYPE Ros_CtrlGroup_FindGrpId | ( | int | groupNo | ) |
Definition at line 42 of file CtrlGroup.c.
| UCHAR Ros_CtrlGroup_GetAxisConfig | ( | CtrlGroup * | ctrlGroup | ) |
Definition at line 618 of file CtrlGroup.c.
| BOOL Ros_CtrlGroup_GetFBPulsePos | ( | CtrlGroup * | ctrlGroup, |
| long | pulsePos[MAX_PULSE_AXES] | ||
| ) |
Definition at line 271 of file CtrlGroup.c.
| BOOL Ros_CtrlGroup_GetFBServoSpeed | ( | CtrlGroup * | ctrlGroup, |
| long | pulseSpeed[MAX_PULSE_AXES] | ||
| ) |
Definition at line 345 of file CtrlGroup.c.
| BOOL Ros_CtrlGroup_GetPulsePosCmd | ( | CtrlGroup * | ctrlGroup, |
| long | pulsePos[MAX_PULSE_AXES] | ||
| ) |
Definition at line 212 of file CtrlGroup.c.
| BOOL Ros_CtrlGroup_GetTorque | ( | CtrlGroup * | ctrlGroup, |
| double | torqueValues[MAX_PULSE_AXES] | ||
| ) |
Definition at line 450 of file CtrlGroup.c.
| BOOL Ros_CtrlGroup_IsRobot | ( | CtrlGroup * | ctrlGroup | ) |
Definition at line 635 of file CtrlGroup.c.