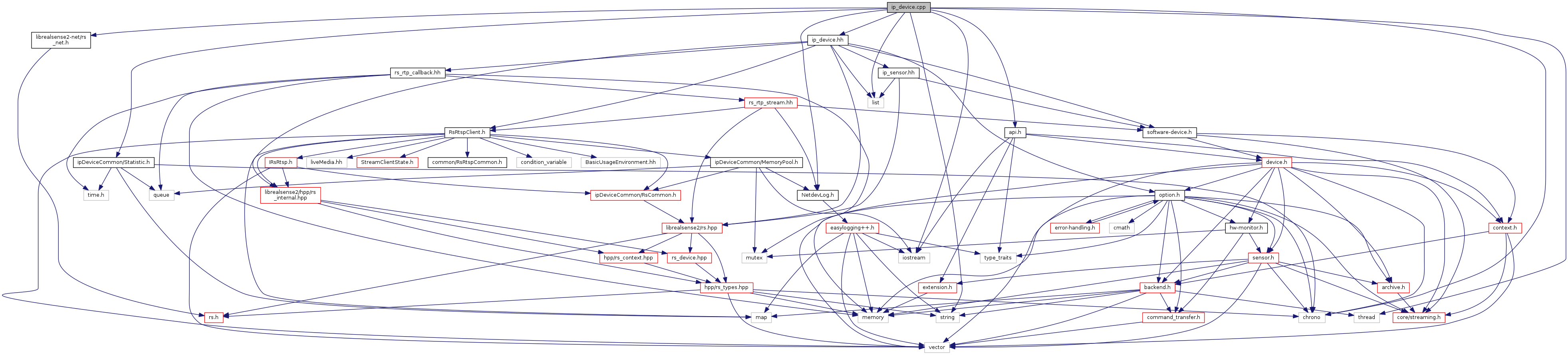
#include "ip_device.hh"#include <ipDeviceCommon/Statistic.h>#include "api.h"#include <librealsense2-net/rs_net.h>#include <chrono>#include <list>#include <thread>#include <iostream>#include <string>#include <NetdevLog.h>
Include dependency graph for ip_device.cpp:
Go to the source code of this file.
Functions | |
| rs2_video_stream | convert_stream_object (rs2::video_stream_profile sp) |
| rs2_device * | rs2_create_net_device (int api_version, const char *address, rs2_error **error) BEGIN_API_CALL |
| int | stream_type_to_sensor_id (rs2_stream type) |
Variables | |
| std::map< std::pair< int, int >, rs2_extrinsics > | minimal_extrinsics_map |
| std::string | sensors_str [] = {STEREO_SENSOR_NAME, RGB_SENSOR_NAME} |
Function Documentation
| rs2_video_stream convert_stream_object | ( | rs2::video_stream_profile | sp | ) |
Definition at line 301 of file ip_device.cpp.
| rs2_device* rs2_create_net_device | ( | int | api_version, |
| const char * | address, | ||
| rs2_error ** | error | ||
| ) |
Net device is a rs2_device that can be stream and be contolled remotely over network
- Parameters
-
[in] api_version Users are expected to pass their version of RS2_API_VERSIONto make sure they are running the correct librealsense version.[in] address remote devce ip address. should be the address of the hosting device [out] error if non-null, receives any error that occurs during this call, otherwise, errors are ignored
Definition at line 403 of file ip_device.cpp.
| int stream_type_to_sensor_id | ( | rs2_stream | type | ) |
Definition at line 350 of file ip_device.cpp.
Variable Documentation
| std::map<std::pair<int, int>, rs2_extrinsics> minimal_extrinsics_map |
Definition at line 22 of file RsRtspClient.cpp.
| std::string sensors_str[] = {STEREO_SENSOR_NAME, RGB_SENSOR_NAME} |
Definition at line 20 of file ip_device.cpp.