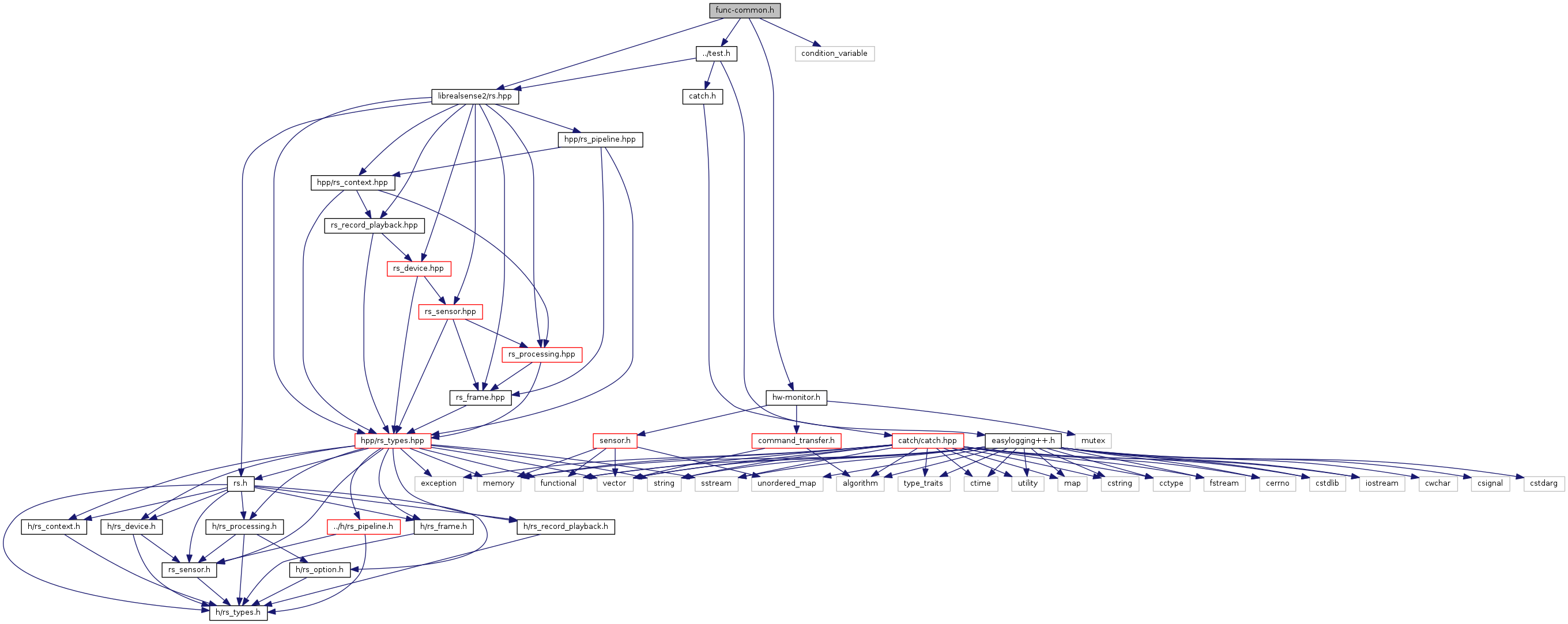
#include "../test.h"
#include "librealsense2/rs.hpp"
#include <condition_variable>
#include "hw-monitor.h"
Go to the source code of this file.
|
| void | do_while_streaming (rs2::sensor depth_sens, std::vector< stream_profile > profiles, std::function< void() > action) |
| |
| void | exit_if_fw_version_is_under (rs2::device &dev, librealsense::firmware_version version) |
| |
| stream_profile | find_confidence_corresponding_to_depth (rs2::depth_sensor depth_sens, stream_profile depth_profile) |
| |
| stream_profile | find_default_depth_profile (rs2::depth_sensor depth_sens) |
| |
| stream_profile | find_default_ir_profile (rs2::depth_sensor depth_sens) |
| |
| rs2::device_list | find_devices_by_product_line_or_exit (int product) |
| |
| rs2::device | find_first_device_by_name_or_exit (const std::string &dev_name) |
| |
| rs2::device | find_first_device_or_exit () |
| |
| rs2::depth_sensor | find_first_supported_depth_sensor_or_exit (const std::string &dev_name, rs2_option opt) |
| |
| stream_profile | find_profile (rs2::depth_sensor depth_sens, rs2_stream stream, rs2_sensor_mode mode) |
| |
| rs2::stream_profile | get_profile_by_stream_parameters (rs2::sensor s, rs2_stream stream=RS2_STREAM_ANY, rs2_format format=RS2_FORMAT_ANY, int width=-1, int height=-1, int fps=-1, int stream_index=-1) |
| |
| void | remove_all_streams_arrived (rs2::frame f, std::vector< rs2::stream_profile > &expected_streams) |
| |
| template<class T > |
| void | start_default_l500_depth_profiles (rs2::depth_sensor depth_sens, T callback, bool with_confidence=false) |
| |
template<class T >
| void start_default_l500_depth_profiles |
( |
rs2::depth_sensor |
depth_sens, |
|
|
T |
callback, |
|
|
bool |
with_confidence = false |
|
) |
| |
|
inline |