#include <rs_processing.hpp>
Public Member Functions | |
| align (rs2_stream align_to) | |
| frameset | process (frameset frames) |
 Public Member Functions inherited from rs2::filter Public Member Functions inherited from rs2::filter | |
| template<class T > | |
| T | as () const |
| filter (std::shared_ptr< rs2_processing_block > block, int queue_size=1) | |
| template<class S > | |
| filter (S processing_function, int queue_size=1) | |
| rs2_processing_block * | get () const |
| frame_queue | get_queue () |
| template<class T > | |
| bool | is () const |
| operator bool () const | |
| rs2::frame | process (rs2::frame frame) const override |
| Public Member Functions inherited from rs2::processing_block | |
| rs2_processing_block * | get () const |
| const char * | get_info (rs2_camera_info info) const |
| void | invoke (frame f) const |
| operator rs2_options * () const | |
| template<class S > | |
| S & | operator>> (S &on_frame) |
| processing_block (std::shared_ptr< rs2_processing_block > block) | |
| template<class S > | |
| processing_block (S processing_function) | |
| template<class S > | |
| void | start (S on_frame) |
| bool | supports (rs2_camera_info info) const |
| Public Member Functions inherited from rs2::options | |
| float | get_option (rs2_option option) const |
| const char * | get_option_description (rs2_option option) const |
| const char * | get_option_name (rs2_option option) const |
| option_range | get_option_range (rs2_option option) const |
| const char * | get_option_value_description (rs2_option option, float val) const |
| std::vector< rs2_option > | get_supported_options () |
| bool | is_option_read_only (rs2_option option) const |
| options & | operator= (const options &other) |
| options (const options &other) | |
| void | set_option (rs2_option option, float value) const |
| bool | supports (rs2_option option) const |
| virtual | ~options ()=default |
| Public Member Functions inherited from rs2::filter_interface | |
| virtual | ~filter_interface ()=default |
Protected Member Functions | |
| align (std::shared_ptr< rs2_processing_block > block) | |
| Protected Member Functions inherited from rs2::processing_block | |
| void | register_simple_option (rs2_option option_id, option_range range) |
| Protected Member Functions inherited from rs2::options | |
| template<class T > | |
| options & | operator= (const T &dev) |
| options (rs2_options *o=nullptr) | |
Private Member Functions | |
| std::shared_ptr< rs2_processing_block > | init (rs2_stream align_to) |
Friends | |
| class | context |
Additional Inherited Members | |
| Protected Attributes inherited from rs2::filter | |
| frame_queue | _queue |
| Protected Attributes inherited from rs2::processing_block | |
| std::shared_ptr< rs2_processing_block > | _block |
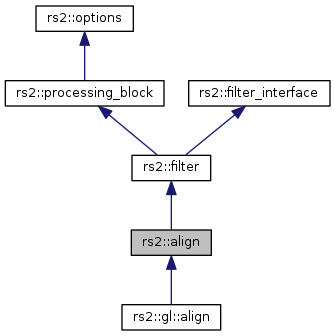
Detailed Description
Auxiliary processing block that performs image alignment using depth data and camera calibration
Definition at line 664 of file rs_processing.hpp.
Constructor & Destructor Documentation
|
inline |
Create align filter Alignment is performed between a depth image and another image. To perform alignment of a depth image to the other, set the align_to parameter with the other stream type. To perform alignment of a non depth image to a depth image, set the align_to parameter to RS2_STREAM_DEPTH. Camera calibration and frame's stream type are determined on the fly, according to the first valid frameset passed to process().
- Parameters
-
[in] align_to The stream type to which alignment should be made.
Definition at line 676 of file rs_processing.hpp.
|
inlineprotected |
Definition at line 692 of file rs_processing.hpp.
Member Function Documentation
|
inlineprivate |
Definition at line 696 of file rs_processing.hpp.
Run the alignment process on the given frames to get an aligned set of frames
- Parameters
-
[in] frames A set of frames, where at least one of which is a depth frame
- Returns
- Input frames aligned to one another
Definition at line 686 of file rs_processing.hpp.
Friends And Related Function Documentation
|
friend |
Definition at line 695 of file rs_processing.hpp.
The documentation for this class was generated from the following file: