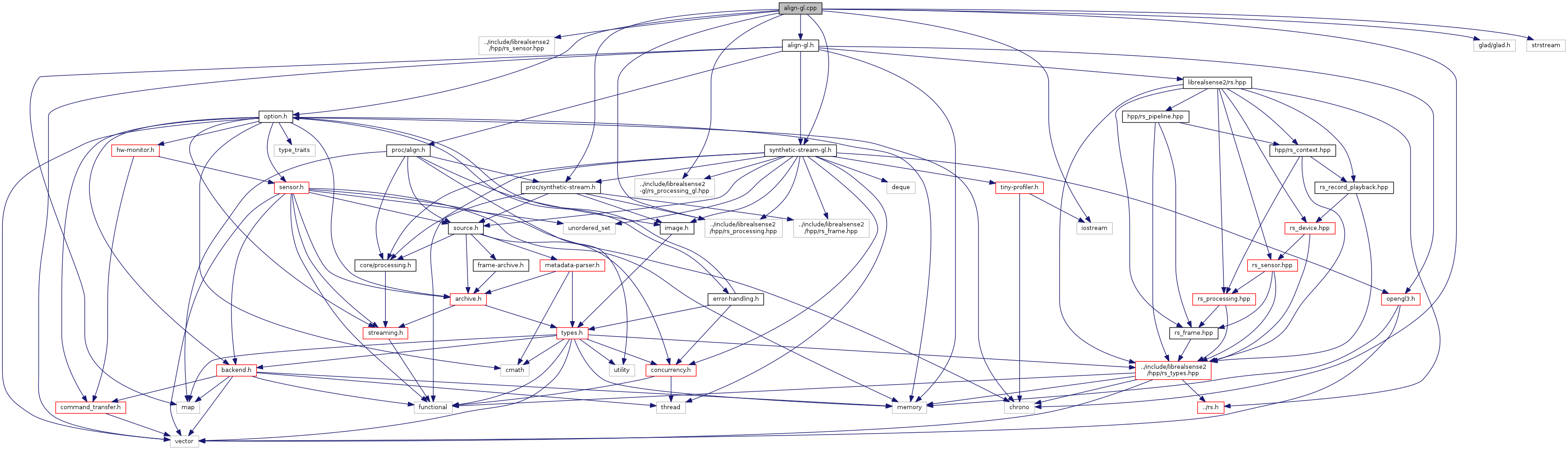
#include "../include/librealsense2/hpp/rs_sensor.hpp"#include "../include/librealsense2/hpp/rs_processing.hpp"#include "../include/librealsense2-gl/rs_processing_gl.hpp"#include "proc/synthetic-stream.h"#include "align-gl.h"#include "option.h"#include <glad/glad.h>#include <iostream>#include <chrono>#include <strstream>#include "synthetic-stream-gl.h"
Include dependency graph for align-gl.cpp:
Go to the source code of this file.
Macros | |
| #define | NOMINMAX |
Functions | |
| void | build_opengl_projection_for_intrinsics (matrix4 &frustum, int *viewport, double alpha, double beta, double skew, double u0, double v0, int img_width, int img_height, double near_clip, double far_clip) |
Macro Definition Documentation
| #define NOMINMAX |
Definition at line 13 of file align-gl.cpp.
Function Documentation
| void build_opengl_projection_for_intrinsics | ( | matrix4 & | frustum, |
| int * | viewport, | ||
| double | alpha, | ||
| double | beta, | ||
| double | skew, | ||
| double | u0, | ||
| double | v0, | ||
| int | img_width, | ||
| int | img_height, | ||
| double | near_clip, | ||
| double | far_clip | ||
| ) |
Definition at line 94 of file align-gl.cpp.