#include <stdlib.h>#include <stdio.h>#include <iostream>#include <sstream>#include <fstream>#include <string>#include <vector>#include <mutex>#include <thread>#include <dirent.h>#include <sys/stat.h>#include <opencv2/opencv.hpp>#include <ros/ros.h>#include <ros/spinner.h>#include <sensor_msgs/CameraInfo.h>#include <sensor_msgs/Image.h>#include <cv_bridge/cv_bridge.h>#include <image_transport/image_transport.h>#include <image_transport/subscriber_filter.h>#include <message_filters/subscriber.h>#include <message_filters/synchronizer.h>#include <message_filters/sync_policies/exact_time.h>#include <kinect2_calibration/kinect2_calibration_definitions.h>#include <kinect2_bridge/kinect2_definitions.h>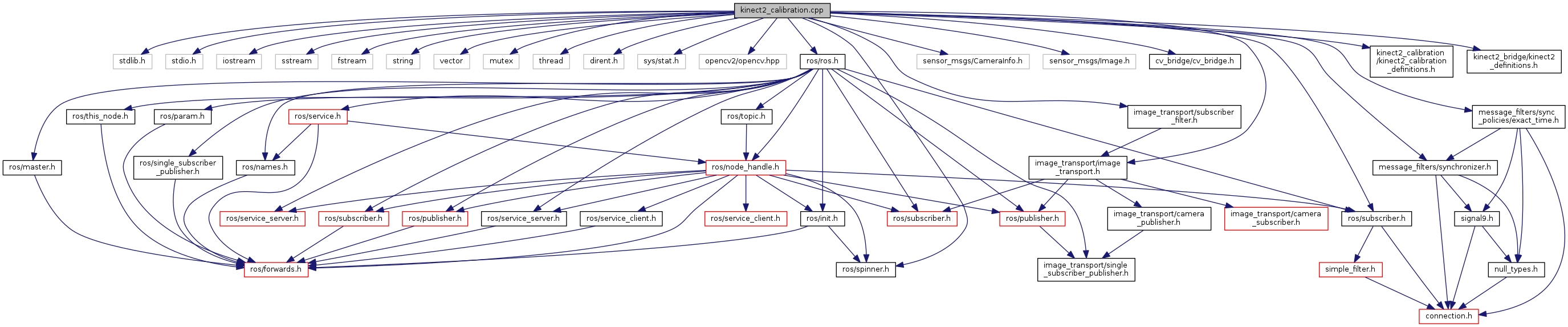
Go to the source code of this file.
Classes | |
| class | CameraCalibration |
| class | DepthCalibration |
| class | Recorder |
Enumerations | |
| enum | Mode { RECORD, CALIBRATE } |
| enum | Source { COLOR, IR, SYNC } |
Functions | |
| void | help (const std::string &path) |
| int | main (int argc, char **argv) |
Enumeration Type Documentation
| enum Mode |
Copyright 2014 University of Bremen, Institute for Artificial Intelligence Author: Thiemo Wiedemeyer wiedemeyer@cs.uni-bremen.de
Licensed under the Apache License, Version 2.0 (the "License"); you may not use this file except in compliance with the License. You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software distributed under the License is distributed on an "AS IS" BASIS, WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the License for the specific language governing permissions and limitations under the License.
| Enumerator | |
|---|---|
| RECORD | |
| CALIBRATE | |
Definition at line 51 of file kinect2_calibration.cpp.
| enum Source |
| Enumerator | |
|---|---|
| COLOR | |
| IR | |
| SYNC | |
Definition at line 57 of file kinect2_calibration.cpp.
Function Documentation
| void help | ( | const std::string & | path | ) |
Definition at line 1168 of file kinect2_calibration.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 1182 of file kinect2_calibration.cpp.