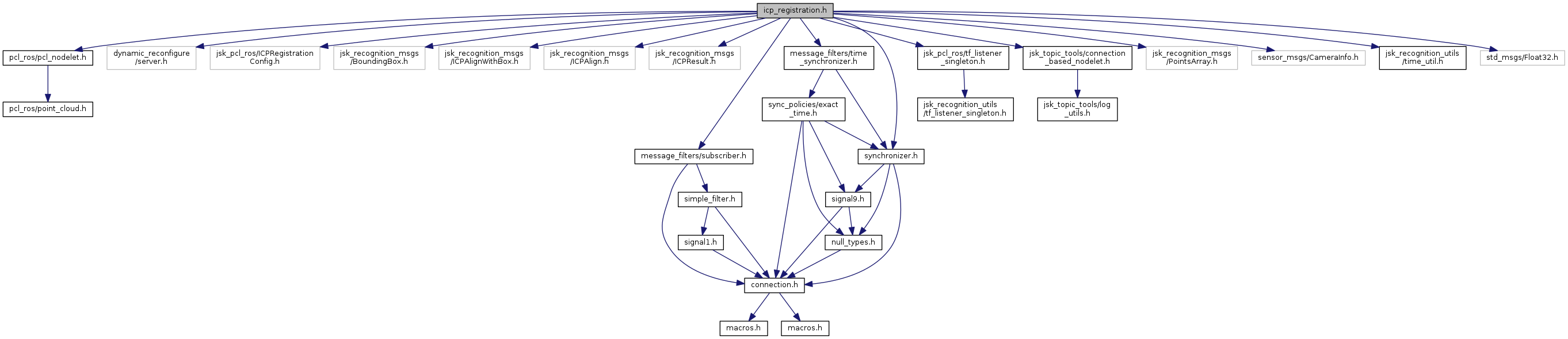
#include <pcl_ros/pcl_nodelet.h>#include <dynamic_reconfigure/server.h>#include <jsk_pcl_ros/ICPRegistrationConfig.h>#include <jsk_recognition_msgs/BoundingBox.h>#include <jsk_recognition_msgs/ICPAlignWithBox.h>#include <jsk_recognition_msgs/ICPAlign.h>#include <jsk_recognition_msgs/ICPResult.h>#include <message_filters/subscriber.h>#include <message_filters/time_synchronizer.h>#include <message_filters/synchronizer.h>#include "jsk_pcl_ros/tf_listener_singleton.h"#include <jsk_topic_tools/connection_based_nodelet.h>#include <jsk_recognition_msgs/PointsArray.h>#include <sensor_msgs/CameraInfo.h>#include <jsk_recognition_utils/time_util.h>#include <std_msgs/Float32.h>
Include dependency graph for icp_registration.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | jsk_pcl_ros::ICPRegistration |
Namespaces | |
| jsk_pcl_ros | |