#include <substate.h>
Public Member Functions | |
| template<typename MatrixType > | |
| Block< MatrixType, CovarianceDimension, CovarianceDimension > | block (MatrixType &matrix) |
| template<typename MatrixType , typename OtherSubState > | |
| Block< MatrixType, CovarianceDimension, OtherSubState::CovarianceDimension > | block (MatrixType &matrix, const OtherSubState &other) |
| template<typename MatrixType > | |
| Block< MatrixType, MatrixType::RowsAtCompileTime, CovarianceDimension > | cols (MatrixType &matrix) |
| ConstCovarianceBlock | getCovariance () const |
| int | getCovarianceDimension () const |
| int | getCovarianceIndex () const |
| template<typename OtherSubState > | |
| Block< const State::Covariance, CovarianceDimension, OtherSubState::CovarianceDimension > | getCrossVariance (const OtherSubState &other) const |
| template<int Size> | |
| VectorBlock< const Vector, Size > | getSegment (IndexType start) const |
| ConstVectorSegment | getVector () const |
| int | getVectorDimension () const |
| int | getVectorIndex () const |
| CovarianceBlock | P () |
| CrossVarianceBlock | P01 () |
| template<typename MatrixType > | |
| Block< MatrixType, CovarianceDimension, MatrixType::ColsAtCompileTime > | rows (MatrixType &matrix) |
| template<typename VectorType > | |
| VectorBlock< VectorType, VectorDimension > | segment (VectorType &vector) |
| SubState_ (State &state) | |
| VectorSegment | vector () |
| virtual | ~SubState_ () |
 Public Member Functions inherited from hector_pose_estimation::SubState Public Member Functions inherited from hector_pose_estimation::SubState | |
| virtual void | normalize () |
| virtual void | reset () |
| SubState (State &state) | |
| virtual void | updated () |
| virtual | ~SubState () |
| Public Member Functions inherited from hector_pose_estimation::SubState::initializer< _VectorDimension, _CovarianceDimension > | |
| initializer (State &state) | |
Additional Inherited Members | |
| Protected Attributes inherited from hector_pose_estimation::SubState | |
| State & | state_ |
| Protected Attributes inherited from hector_pose_estimation::SubState::initializer< _VectorDimension, _CovarianceDimension > | |
| const IndexType | covariance_index_ |
| const IndexType | index_ |
Detailed Description
template<int _VectorDimension, int _CovarianceDimension = _VectorDimension>
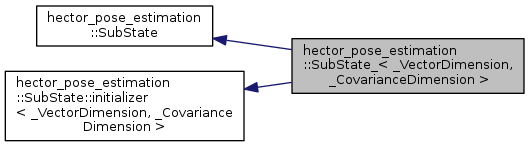
class hector_pose_estimation::SubState_< _VectorDimension, _CovarianceDimension >
Definition at line 84 of file substate.h.
Member Typedef Documentation
| typedef Block<const State::Covariance,CovarianceDimension,CovarianceDimension> hector_pose_estimation::SubState_< _VectorDimension, _CovarianceDimension >::ConstCovarianceBlock |
Definition at line 96 of file substate.h.
| typedef Block<const State::Covariance,Dynamic,CovarianceDimension> hector_pose_estimation::SubState_< _VectorDimension, _CovarianceDimension >::ConstCrossVarianceBlock |
Definition at line 97 of file substate.h.
| typedef VectorBlock<const State::Vector,VectorDimension> hector_pose_estimation::SubState_< _VectorDimension, _CovarianceDimension >::ConstVectorSegment |
Definition at line 95 of file substate.h.
| typedef Block<State::Covariance,CovarianceDimension,CovarianceDimension> hector_pose_estimation::SubState_< _VectorDimension, _CovarianceDimension >::CovarianceBlock |
Definition at line 92 of file substate.h.
| typedef Block<State::Covariance,Dynamic,CovarianceDimension> hector_pose_estimation::SubState_< _VectorDimension, _CovarianceDimension >::CrossVarianceBlock |
Definition at line 93 of file substate.h.
| typedef boost::shared_ptr<SubState_<_VectorDimension, _CovarianceDimension> > hector_pose_estimation::SubState_< _VectorDimension, _CovarianceDimension >::Ptr |
Definition at line 99 of file substate.h.
| typedef ColumnVector_<VectorDimension> hector_pose_estimation::SubState_< _VectorDimension, _CovarianceDimension >::Vector |
Definition at line 89 of file substate.h.
| typedef VectorBlock<State::Vector,VectorDimension> hector_pose_estimation::SubState_< _VectorDimension, _CovarianceDimension >::VectorSegment |
Definition at line 91 of file substate.h.
Member Enumeration Documentation
| anonymous enum |
| Enumerator | |
|---|---|
| VectorDimension | |
Definition at line 87 of file substate.h.
| anonymous enum |
| Enumerator | |
|---|---|
| CovarianceDimension | |
Definition at line 88 of file substate.h.
Constructor & Destructor Documentation
|
inline |
Definition at line 105 of file substate.h.
|
inlinevirtual |
Definition at line 109 of file substate.h.
Member Function Documentation
|
inline |
Definition at line 126 of file substate.h.
|
inline |
Definition at line 127 of file substate.h.
|
inline |
Definition at line 129 of file substate.h.
|
inline |
Definition at line 117 of file substate.h.
|
inlinevirtual |
Implements hector_pose_estimation::SubState.
Definition at line 112 of file substate.h.
|
inlinevirtual |
Implements hector_pose_estimation::SubState.
Definition at line 114 of file substate.h.
|
inline |
Definition at line 118 of file substate.h.
|
inline |
Definition at line 119 of file substate.h.
|
inline |
Definition at line 116 of file substate.h.
|
inlinevirtual |
Implements hector_pose_estimation::SubState.
Definition at line 111 of file substate.h.
|
inlinevirtual |
Implements hector_pose_estimation::SubState.
Definition at line 113 of file substate.h.
|
inline |
Definition at line 122 of file substate.h.
|
inline |
Definition at line 123 of file substate.h.
|
inline |
Definition at line 128 of file substate.h.
|
inline |
Definition at line 125 of file substate.h.
|
inline |
Definition at line 121 of file substate.h.
The documentation for this class was generated from the following file: