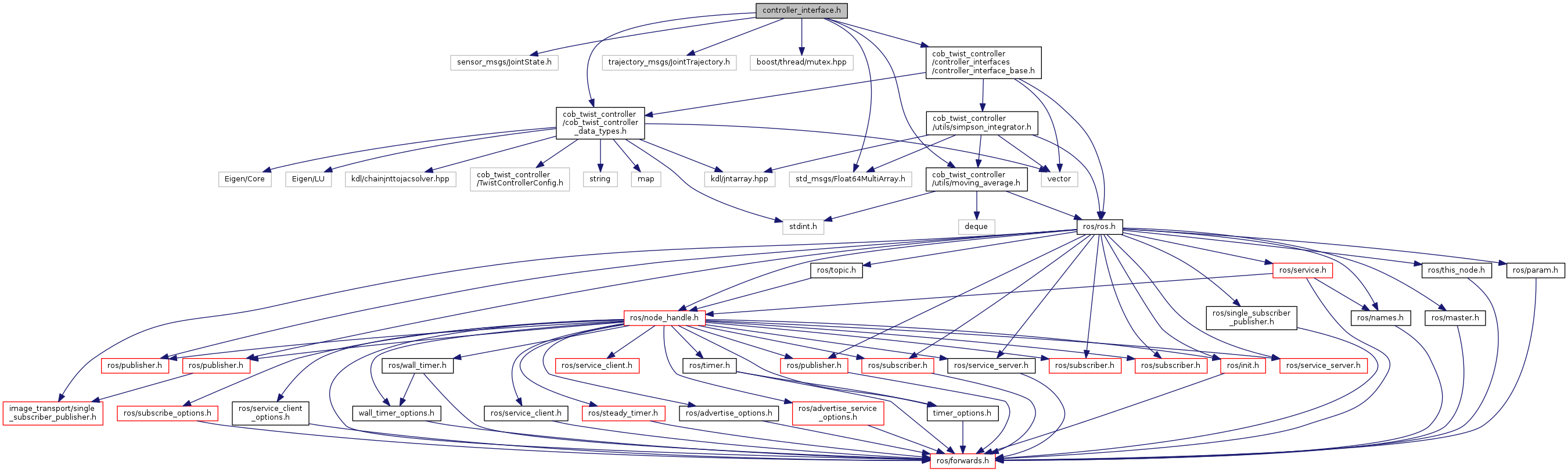
#include <sensor_msgs/JointState.h>#include <std_msgs/Float64MultiArray.h>#include <trajectory_msgs/JointTrajectory.h>#include <boost/thread/mutex.hpp>#include "cob_twist_controller/cob_twist_controller_data_types.h"#include "cob_twist_controller/utils/moving_average.h"#include "cob_twist_controller/controller_interfaces/controller_interface_base.h"
Include dependency graph for controller_interface.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | cob_twist_controller::ControllerInterfaceJointStates |
| Class providing a ControllerInterface publishing JointStates. More... | |
| class | cob_twist_controller::ControllerInterfacePosition |
| Class providing a ControllerInterface publishing JointGroupPositionCommands. More... | |
| class | cob_twist_controller::ControllerInterfaceTrajectory |
| Class providing a ControllerInterface publishing a JointTrajectory. More... | |
| class | cob_twist_controller::ControllerInterfaceVelocity |
| Class providing a ControllerInterface publishing velocities. More... | |
Namespaces | |
| cob_twist_controller | |