#include <vector>#include <planning_models/robot_model.h>#include <planning_models/angle_utils.h>
Include dependency graph for environment_chain3d_types.h:

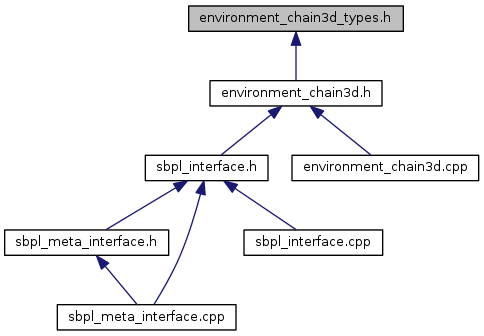
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | sbpl_interface::EnvChain3DGoalPose |
| struct that describes a basic joint constraint More... | |
| struct | sbpl_interface::EnvChain3DHashEntry |
| struct | sbpl_interface::EnvChain3DPlanningData |
| class | sbpl_interface::JointMotionPrimitive |
| class | sbpl_interface::JointMotionWrapper |
| class | sbpl_interface::SingleJointMotionPrimitive |
Namespaces | |
| namespace | sbpl_interface |
Functions | |
| static unsigned int | sbpl_interface::intHash (unsigned int key) |
Variables | |
| static unsigned int | sbpl_interface::HASH_TABLE_SIZE = 32*1024 |