#include <boost/shared_ptr.hpp>#include <srdfdom/model.h>#include <srdfdom/srdf_writer.h>#include <urdf/model.h>#include <moveit/macros/class_forward.h>#include <moveit/planning_scene/planning_scene.h>#include <moveit/collision_detection/collision_matrix.h>#include <moveit/setup_assistant/tools/compute_default_collisions.h>
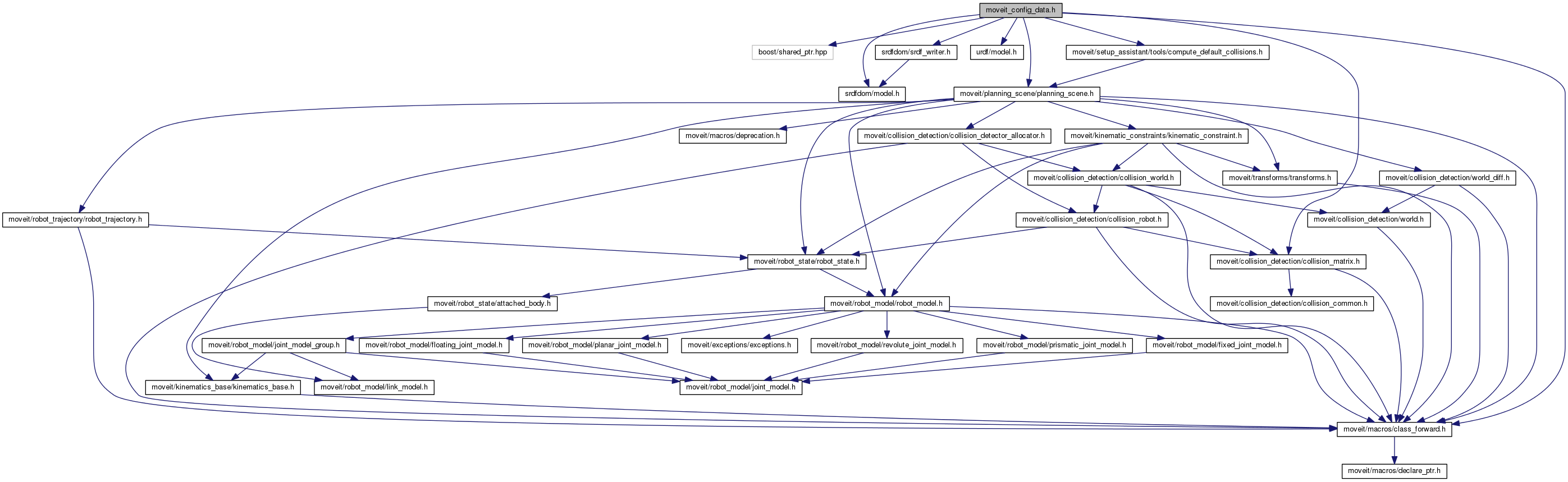
Include dependency graph for moveit_config_data.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| struct | moveit_setup_assistant::GroupMetaData |
| struct | moveit_setup_assistant::MoveItConfigData::joint_model_compare |
| Custom std::set comparator, used for sorting the joint_limits.yaml file into alphabetical order. More... | |
| class | moveit_setup_assistant::MoveItConfigData |
| This class is shared with all widgets and contains the common configuration data needed for generating each robot's MoveIt configuration package. More... | |
| class | moveit_setup_assistant::OMPLPlannerDescription |
| This class describes the OMPL planners by name, type, and parameter list, used to create the ompl_planning.yaml file. More... | |
| struct | moveit_setup_assistant::OmplPlanningParameter |
Namespaces | |
| namespace | moveit_setup_assistant |
Functions | |
| moveit_setup_assistant::MOVEIT_CLASS_FORWARD (MoveItConfigData) | |
Variables | |
| static const int | moveit_setup_assistant::DEFAULT_KIN_SOLVER_ATTEMPTS_ = 3 |
| static const double | moveit_setup_assistant::DEFAULT_KIN_SOLVER_SEARCH_RESOLUTION_ = 0.005 |
| static const double | moveit_setup_assistant::DEFAULT_KIN_SOLVER_TIMEOUT_ = 0.005 |
| static const std::string | moveit_setup_assistant::MOVEIT_ROBOT_STATE = "moveit_robot_state" |
| static const std::string | moveit_setup_assistant::ROBOT_DESCRIPTION = "robot_description" |