#include <quadrotor_hardware_gazebo.h>
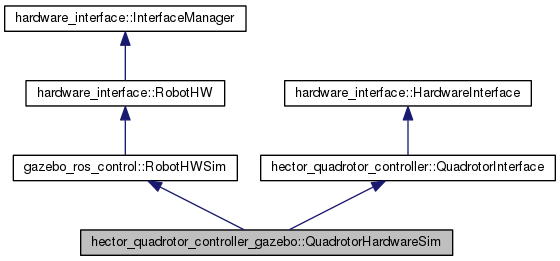
Detailed Description
Definition at line 48 of file quadrotor_hardware_gazebo.h.
Constructor & Destructor Documentation
Definition at line 35 of file quadrotor_hardware_gazebo.cpp.
Definition at line 43 of file quadrotor_hardware_gazebo.cpp.
Member Function Documentation
| virtual AccelerationHandlePtr hector_quadrotor_controller_gazebo::QuadrotorHardwareSim::getAcceleration | ( | ) | [inline, virtual] |
Reimplemented from hector_quadrotor_controller::QuadrotorInterface.
Definition at line 58 of file quadrotor_hardware_gazebo.h.
| bool hector_quadrotor_controller_gazebo::QuadrotorHardwareSim::getMassAndInertia | ( | double & | mass, |
| double | inertia[3] | ||
| ) | [virtual] |
Reimplemented from hector_quadrotor_controller::QuadrotorInterface.
Definition at line 109 of file quadrotor_hardware_gazebo.cpp.
| virtual MotorStatusHandlePtr hector_quadrotor_controller_gazebo::QuadrotorHardwareSim::getMotorStatus | ( | ) | [inline, virtual] |
Reimplemented from hector_quadrotor_controller::QuadrotorInterface.
Definition at line 60 of file quadrotor_hardware_gazebo.h.
| virtual PoseHandlePtr hector_quadrotor_controller_gazebo::QuadrotorHardwareSim::getPose | ( | ) | [inline, virtual] |
Reimplemented from hector_quadrotor_controller::QuadrotorInterface.
Definition at line 56 of file quadrotor_hardware_gazebo.h.
| virtual ImuHandlePtr hector_quadrotor_controller_gazebo::QuadrotorHardwareSim::getSensorImu | ( | ) | [inline, virtual] |
Reimplemented from hector_quadrotor_controller::QuadrotorInterface.
Definition at line 59 of file quadrotor_hardware_gazebo.h.
| virtual const ros::Time& hector_quadrotor_controller_gazebo::QuadrotorHardwareSim::getTimestamp | ( | ) | [inline, virtual] |
Definition at line 54 of file quadrotor_hardware_gazebo.h.
| virtual TwistHandlePtr hector_quadrotor_controller_gazebo::QuadrotorHardwareSim::getTwist | ( | ) | [inline, virtual] |
Reimplemented from hector_quadrotor_controller::QuadrotorInterface.
Definition at line 57 of file quadrotor_hardware_gazebo.h.
| void hector_quadrotor_controller_gazebo::QuadrotorHardwareSim::imuCallback | ( | const sensor_msgs::ImuConstPtr & | imu | ) | [private] |
Definition at line 136 of file quadrotor_hardware_gazebo.cpp.
| bool hector_quadrotor_controller_gazebo::QuadrotorHardwareSim::initSim | ( | const std::string & | robot_namespace, |
| ros::NodeHandle | model_nh, | ||
| gazebo::physics::ModelPtr | parent_model, | ||
| const urdf::Model *const | urdf_model, | ||
| std::vector< transmission_interface::TransmissionInfo > | transmissions | ||
| ) | [virtual] |
Implements gazebo_ros_control::RobotHWSim.
Definition at line 48 of file quadrotor_hardware_gazebo.cpp.
| void hector_quadrotor_controller_gazebo::QuadrotorHardwareSim::motorStatusCallback | ( | const hector_uav_msgs::MotorStatusConstPtr & | motor_status | ) | [private] |
Definition at line 140 of file quadrotor_hardware_gazebo.cpp.
| void hector_quadrotor_controller_gazebo::QuadrotorHardwareSim::readSim | ( | ros::Time | time, |
| ros::Duration | period | ||
| ) | [virtual] |
Implements gazebo_ros_control::RobotHWSim.
Definition at line 144 of file quadrotor_hardware_gazebo.cpp.
| void hector_quadrotor_controller_gazebo::QuadrotorHardwareSim::stateCallback | ( | const nav_msgs::OdometryConstPtr & | state | ) | [private] |
Definition at line 119 of file quadrotor_hardware_gazebo.cpp.
| void hector_quadrotor_controller_gazebo::QuadrotorHardwareSim::writeSim | ( | ros::Time | time, |
| ros::Duration | period | ||
| ) | [virtual] |
Implements gazebo_ros_control::RobotHWSim.
Definition at line 195 of file quadrotor_hardware_gazebo.cpp.
Member Data Documentation
Definition at line 84 of file quadrotor_hardware_gazebo.h.
std::string hector_quadrotor_controller_gazebo::QuadrotorHardwareSim::base_link_frame_ [protected] |
Definition at line 87 of file quadrotor_hardware_gazebo.h.
ros::CallbackQueue hector_quadrotor_controller_gazebo::QuadrotorHardwareSim::callback_queue_ [protected] |
Definition at line 99 of file quadrotor_hardware_gazebo.h.
gazebo::math::Vector3 hector_quadrotor_controller_gazebo::QuadrotorHardwareSim::gz_acceleration_ [protected] |
Definition at line 97 of file quadrotor_hardware_gazebo.h.
gazebo::math::Vector3 hector_quadrotor_controller_gazebo::QuadrotorHardwareSim::gz_angular_velocity_ [protected] |
Definition at line 97 of file quadrotor_hardware_gazebo.h.
Definition at line 96 of file quadrotor_hardware_gazebo.h.
gazebo::math::Vector3 hector_quadrotor_controller_gazebo::QuadrotorHardwareSim::gz_velocity_ [protected] |
Definition at line 97 of file quadrotor_hardware_gazebo.h.
Definition at line 81 of file quadrotor_hardware_gazebo.h.
Imu hector_quadrotor_controller_gazebo::QuadrotorHardwareSim::imu_ [protected] |
Definition at line 85 of file quadrotor_hardware_gazebo.h.
gazebo::physics::LinkPtr hector_quadrotor_controller_gazebo::QuadrotorHardwareSim::link_ [protected] |
Definition at line 93 of file quadrotor_hardware_gazebo.h.
gazebo::physics::ModelPtr hector_quadrotor_controller_gazebo::QuadrotorHardwareSim::model_ [protected] |
Definition at line 92 of file quadrotor_hardware_gazebo.h.
MotorCommandHandlePtr hector_quadrotor_controller_gazebo::QuadrotorHardwareSim::motor_output_ [protected] |
Definition at line 90 of file quadrotor_hardware_gazebo.h.
MotorStatus hector_quadrotor_controller_gazebo::QuadrotorHardwareSim::motor_status_ [protected] |
Definition at line 86 of file quadrotor_hardware_gazebo.h.
gazebo::physics::PhysicsEnginePtr hector_quadrotor_controller_gazebo::QuadrotorHardwareSim::physics_ [protected] |
Definition at line 94 of file quadrotor_hardware_gazebo.h.
Definition at line 82 of file quadrotor_hardware_gazebo.h.
ros::Publisher hector_quadrotor_controller_gazebo::QuadrotorHardwareSim::publisher_motor_command_ [protected] |
Definition at line 104 of file quadrotor_hardware_gazebo.h.
ros::Publisher hector_quadrotor_controller_gazebo::QuadrotorHardwareSim::publisher_wrench_command_ [protected] |
Definition at line 103 of file quadrotor_hardware_gazebo.h.
ros::Subscriber hector_quadrotor_controller_gazebo::QuadrotorHardwareSim::subscriber_imu_ [protected] |
Definition at line 101 of file quadrotor_hardware_gazebo.h.
ros::Subscriber hector_quadrotor_controller_gazebo::QuadrotorHardwareSim::subscriber_motor_status_ [protected] |
Definition at line 102 of file quadrotor_hardware_gazebo.h.
ros::Subscriber hector_quadrotor_controller_gazebo::QuadrotorHardwareSim::subscriber_state_ [protected] |
Definition at line 100 of file quadrotor_hardware_gazebo.h.
Twist hector_quadrotor_controller_gazebo::QuadrotorHardwareSim::twist_ [protected] |
Definition at line 83 of file quadrotor_hardware_gazebo.h.
std::string hector_quadrotor_controller_gazebo::QuadrotorHardwareSim::world_frame_ [protected] |
Definition at line 87 of file quadrotor_hardware_gazebo.h.
WrenchCommandHandlePtr hector_quadrotor_controller_gazebo::QuadrotorHardwareSim::wrench_output_ [protected] |
Definition at line 89 of file quadrotor_hardware_gazebo.h.
The documentation for this class was generated from the following files: