Public Types |
| enum | ControlStrategy { JOINT_POSITION = 10,
JOINT_VELOCITY = 15
} |
Public Member Functions |
| virtual bool | canSwitch (const std::list< hardware_interface::ControllerInfo > &start_list, const std::list< hardware_interface::ControllerInfo > &stop_list) const |
| void | create (std::string name, std::string urdf_string) |
| virtual void | doSwitch (const std::list< hardware_interface::ControllerInfo > &start_list, const std::list< hardware_interface::ControllerInfo > &stop_list) |
| void | enforceLimits (ros::Duration period) |
| ControlStrategy | getControlStrategy () |
| virtual bool | init ()=0 |
| virtual void | read (ros::Time time, ros::Duration period)=0 |
| void | reset () |
| void | setControlStrategy (ControlStrategy strategy) |
| virtual void | write (ros::Time time, ros::Duration period)=0 |
| | YumiHW () |
| virtual | ~YumiHW () |
Public Attributes |
| ControlStrategy | current_strategy_ |
| std::vector< double > | joint_effort_ |
| std::vector< double > | joint_lower_limits_ |
| std::vector< std::string > | joint_names_ |
| std::vector< double > | joint_position_ |
| std::vector< double > | joint_position_command_ |
| std::vector< double > | joint_position_prev_ |
| std::vector< double > | joint_upper_limits_ |
| std::vector< double > | joint_velocity_ |
| std::vector< double > | joint_velocity_command_ |
| int | n_joints_ |
| joint_limits_interface::PositionJointSoftLimitsInterface | pj_limits_interface_ |
| joint_limits_interface::PositionJointSaturationInterface | pj_sat_interface_ |
| hardware_interface::PositionJointInterface | position_interface_ |
| std::string | robot_namespace_ |
| hardware_interface::JointStateInterface | state_interface_ |
std::vector
< transmission_interface::TransmissionInfo > | transmissions_ |
| urdf::Model | urdf_model_ |
| std::string | urdf_string_ |
| hardware_interface::VelocityJointInterface | velocity_interface_ |
| joint_limits_interface::VelocityJointSoftLimitsInterface | vj_limits_interface_ |
| joint_limits_interface::VelocityJointSaturationInterface | vj_sat_interface_ |
Private Member Functions |
| bool | parseTransmissionsFromURDF (const std::string &urdf_string) |
| void | registerInterfaces (const urdf::Model *const urdf_model, std::vector< transmission_interface::TransmissionInfo > transmissions) |
| void | registerJointLimits (const std::string &joint_name, const hardware_interface::JointHandle &joint_handle_position, const hardware_interface::JointHandle &joint_handle_velocity, const urdf::Model *const urdf_model, double *const lower_limit, double *const upper_limit) |
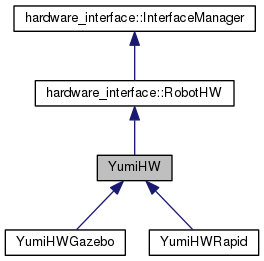
Base class for yumi hw interface. Extended later for gazebo and for real robot over rapid
Definition at line 34 of file yumi_hw.h.