Provides methods to generate contacts for GraspIt! including an interative viewer. More...
#include <ContactsGenerator.h>
Classes | |
| class | Contact |
| Helper class to encapsulate contact information. More... | |
Public Member Functions | |
| ContactsGenerator (UrdfTraverserPtr &traverser, float _scaleFactor=1000) | |
| bool | generateContacts (const std::vector< std::string > &rootFingerJoints, const std::string &palmLinkName, const float coefficient, const markerselector::MarkerSelector::MarkerMap &markers, const std::vector< DHParam > &dh) |
| bool | generateContactsWithViewer (const std::vector< std::string > &fingerRoots, const std::string &palmLinkName, float standard_coefficient, const std::vector< DHParam > &dh, bool _displayAxes, bool _axesFromDH, float _axesRadius, float _axesLength, const EigenTransform &addVisualTransform, bool facesCCW) |
| std::string | getContactsFileContent (const std::string &robotName) |
| ~ContactsGenerator () | |
Protected Types | |
| typedef baselib_binding::shared_ptr < Contact >::type | ContactPtr |
Protected Member Functions | |
| void | applyTransformToContacts (LinkPtr &link, const EigenTransform &trans, bool preMult) |
| SoNode * | getAxesAsInventor (const LinkPtr &from_link, const std::vector< DHParam > &dh, float _axesRadius, float _axesLength, bool linkIsRoot) |
| bool | transformToDHReferenceFrames (const std::vector< DHParam > &dh) |
Static Protected Member Functions | |
| static bool | getDHParam (const std::string jointName, const std::vector< DHParam > &dh, DHParam &jointDH) |
Private Member Functions | |
| bool | generateContactsForallVisuals (const std::string &linkName, const int linkNum, const int fingerNum, const float coefficient, const std::vector< markerselector::MarkerSelector::Marker > &markers) |
| void | scaleContacts (double scale_factor) |
Private Attributes | |
| std::vector< ContactPtr > | contacts |
| bool | isContactsScaled |
| std::map< std::string, std::vector< ContactPtr > > | linkContacts |
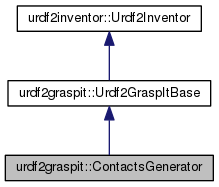
Detailed Description
Provides methods to generate contacts for GraspIt! including an interative viewer.
- Date:
- March 2016
Definition at line 53 of file ContactsGenerator.h.
Member Typedef Documentation
typedef baselib_binding::shared_ptr<Contact>::type urdf2graspit::ContactsGenerator::ContactPtr [protected] |
Definition at line 153 of file ContactsGenerator.h.
Constructor & Destructor Documentation
| urdf2graspit::ContactsGenerator::ContactsGenerator | ( | UrdfTraverserPtr & | traverser, |
| float | _scaleFactor = 1000 |
||
| ) | [inline, explicit] |
- Parameters:
-
_scaleFactor the graspit model might have to be scaled (the urdf model is in meters, graspit! in millimeters). This can be specified with this scale factor.
Definition at line 60 of file ContactsGenerator.h.
| urdf2graspit::ContactsGenerator::~ContactsGenerator | ( | ) | [inline] |
Definition at line 66 of file ContactsGenerator.h.
Member Function Documentation
| void ContactsGenerator::applyTransformToContacts | ( | LinkPtr & | link, |
| const EigenTransform & | trans, | ||
| bool | preMult | ||
| ) | [protected] |
Definition at line 75 of file ContactsGenerator.cpp.
| bool ContactsGenerator::generateContacts | ( | const std::vector< std::string > & | rootFingerJoints, |
| const std::string & | palmLinkName, | ||
| const float | coefficient, | ||
| const markerselector::MarkerSelector::MarkerMap & | markers, | ||
| const std::vector< DHParam > & | dh | ||
| ) |
Generates contacts file out of the markers defined in the map. This function is provided in case the markers information is obtained in a user-defined way. For an interactive marker generation, use function generateContactsWithViewer(). After contacts have been generated, they will be put into DH-space specified in dh.
**Careful**: This function will join fixed links in the loaded URDF, and will also change all rotation axes to be the z axis
- Parameters:
-
markers a map with the markers. coefficient Contact friction coefficient
Definition at line 209 of file ContactsGenerator.cpp.
| bool ContactsGenerator::generateContactsForallVisuals | ( | const std::string & | linkName, |
| const int | linkNum, | ||
| const int | fingerNum, | ||
| const float | coefficient, | ||
| const std::vector< markerselector::MarkerSelector::Marker > & | markers | ||
| ) | [private] |
Definition at line 111 of file ContactsGenerator.cpp.
| bool ContactsGenerator::generateContactsWithViewer | ( | const std::vector< std::string > & | fingerRoots, |
| const std::string & | palmLinkName, | ||
| float | standard_coefficient, | ||
| const std::vector< DHParam > & | dh, | ||
| bool | _displayAxes, | ||
| bool | _axesFromDH, | ||
| float | _axesRadius, | ||
| float | _axesLength, | ||
| const EigenTransform & | addVisualTransform, | ||
| bool | facesCCW | ||
| ) |
Starts a viewer in which the user may select contact points to be defined for the hand. The function generateContacts() is then called so that contacts are defined for the model.
- Parameters:
-
_displayAxes add the local coordinate system axes of the links to the inventor nodes to display. z axis is displayed blue, y axis green, x axis red. _axesFromDH if true, then _displayAxes will display the DH reference frame axes, otherwise it will be the link reference frames in URDF. _axesRadius radius of the axes, if _addAxes is true _axesLength length of the axes, if _addAxes is true addVisualTransform this transform will be post-multiplied on all links' **visuals** (not links!) local transform (their "origin"). This can be used to correct transformation errors which may have been introduced in converting meshes from one format to the other, losing orientation information (for example, .dae has an "up vector" definition which may have been ignored) facesCCW the faces in the model are ordered counter-clockwise (true should be default)
Definition at line 472 of file ContactsGenerator.cpp.
| SoNode * ContactsGenerator::getAxesAsInventor | ( | const LinkPtr & | from_link, |
| const std::vector< DHParam > & | dh, | ||
| float | _axesRadius, | ||
| float | _axesLength, | ||
| bool | linkIsRoot | ||
| ) | [protected] |
Definition at line 389 of file ContactsGenerator.cpp.
| std::string ContactsGenerator::getContactsFileContent | ( | const std::string & | robotName | ) |
Writes the file for the contacts. Will only work after generateContacts() has been called.
Definition at line 304 of file ContactsGenerator.cpp.
| bool ContactsGenerator::getDHParam | ( | const std::string | jointName, |
| const std::vector< DHParam > & | dh, | ||
| DHParam & | jointDH | ||
| ) | [static, protected] |
Definition at line 459 of file ContactsGenerator.cpp.
| void ContactsGenerator::scaleContacts | ( | double | scale_factor | ) | [private] |
scales the contacts by given factor
Definition at line 96 of file ContactsGenerator.cpp.
| bool ContactsGenerator::transformToDHReferenceFrames | ( | const std::vector< DHParam > & | dh | ) | [protected] |
Definition at line 44 of file ContactsGenerator.cpp.
Member Data Documentation
std::vector<ContactPtr> urdf2graspit::ContactsGenerator::contacts [private] |
Definition at line 180 of file ContactsGenerator.h.
bool urdf2graspit::ContactsGenerator::isContactsScaled [private] |
Definition at line 178 of file ContactsGenerator.h.
std::map<std::string, std::vector<ContactPtr> > urdf2graspit::ContactsGenerator::linkContacts [private] |
Definition at line 181 of file ContactsGenerator.h.
The documentation for this class was generated from the following files: