This compatibility interface is a wrapper around the new etherCAT Hand ROS driver. It is used to present the same interface as the CAN hand. More...
#include <etherCAT_compatibility_hand.hpp>
Public Member Functions | |
| EtherCATCompatibilityHand () | |
| virtual JointsMap | getAllJointsData () |
| virtual void | getConfig (std::string joint_name) |
| virtual JointControllerData | getContrl (std::string ctrlr_name) |
| virtual std::vector < DiagnosticData > | getDiagnostics () |
| virtual JointData | getJointData (std::string joint_name) |
| virtual short | sendupdate (std::string joint_name, double target) |
| virtual short | setConfig (std::vector< std::string > myConfig) |
| virtual short | setContrl (std::string contrlr_name, JointControllerData ctrlr_data) |
| virtual | ~EtherCATCompatibilityHand () |
Protected Member Functions | |
| std::string | findControllerTopicName (std::string joint_name) |
| void | initializeMap () |
| void | joint_states_callback (const sensor_msgs::JointStateConstPtr &msg) |
Protected Attributes | |
| std::vector< ros::Publisher > | etherCAT_publishers |
| This vector stores publishers to each joint controller. | |
| ros::Subscriber | joint_state_subscriber |
| a subscriber for the /joint_states topic. | |
| ros::NodeHandle | n_tilde |
| ros::NodeHandle | node |
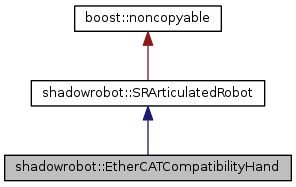
Detailed Description
This compatibility interface is a wrapper around the new etherCAT Hand ROS driver. It is used to present the same interface as the CAN hand.
Definition at line 45 of file etherCAT_compatibility_hand.hpp.
Constructor & Destructor Documentation
Initializes the necessary mappings with a static list of names.
Definition at line 39 of file etherCAT_compatibility_hand.cpp.
Definition at line 50 of file etherCAT_compatibility_hand.cpp.
Member Function Documentation
| std::string shadowrobot::EtherCATCompatibilityHand::findControllerTopicName | ( | std::string | joint_name | ) | [protected] |
Finds the controller suffix to use for a certain joint based on listening to the controller state for that joint. mixed_position_velocity_controller and position_controller are checked. If none of them is sending messages, the "controller_suffix" parameter is used
Full controller command topic name is returned
Definition at line 228 of file etherCAT_compatibility_hand.cpp.
| SRArticulatedRobot::JointsMap shadowrobot::EtherCATCompatibilityHand::getAllJointsData | ( | ) | [virtual] |
Get the data for all the joints.
- Returns:
- a mapping between the joints names and the information for each joint.
Implements shadowrobot::SRArticulatedRobot.
Definition at line 306 of file etherCAT_compatibility_hand.cpp.
| void shadowrobot::EtherCATCompatibilityHand::getConfig | ( | std::string | joint_name | ) | [virtual] |
Get the config of the palm
- Todo:
- Not implemented yet
- Parameters:
-
joint_name
Implements shadowrobot::SRArticulatedRobot.
Definition at line 330 of file etherCAT_compatibility_hand.cpp.
| JointControllerData shadowrobot::EtherCATCompatibilityHand::getContrl | ( | std::string | contrlr_name | ) | [virtual] |
Get the controller parameters for a given controller name.
- Parameters:
-
contrlr_name the name of the controller.
- Returns:
- The parameters of this controller
Implements shadowrobot::SRArticulatedRobot.
Definition at line 317 of file etherCAT_compatibility_hand.cpp.
| std::vector< DiagnosticData > shadowrobot::EtherCATCompatibilityHand::getDiagnostics | ( | ) | [virtual] |
Not used in this interface: the diagnostics are published directly by the EtherCAT hand driver.
- Returns:
- A vector containing all the diagnostics for the hand (motor information, etc...)
Implements shadowrobot::SRArticulatedRobot.
Definition at line 335 of file etherCAT_compatibility_hand.cpp.
| JointData shadowrobot::EtherCATCompatibilityHand::getJointData | ( | std::string | joint_name | ) | [virtual] |
Returns the last data we received for the given joint.
- Parameters:
-
joint_name The name of the joint, as specified in joints_map.
- Returns:
- The information regarding this joint.
Implements shadowrobot::SRArticulatedRobot.
Definition at line 284 of file etherCAT_compatibility_hand.cpp.
| void shadowrobot::EtherCATCompatibilityHand::initializeMap | ( | ) | [protected] |
Initialize a mapping for the joints and the publishers.
Definition at line 54 of file etherCAT_compatibility_hand.cpp.
| void shadowrobot::EtherCATCompatibilityHand::joint_states_callback | ( | const sensor_msgs::JointStateConstPtr & | msg | ) | [protected] |
This callback is called each time a joint state message is received. We Update the internal joint map when we receive this message.
- Parameters:
-
msg the joint state message.
Definition at line 341 of file etherCAT_compatibility_hand.cpp.
| short shadowrobot::EtherCATCompatibilityHand::sendupdate | ( | std::string | joint_name, |
| double | target | ||
| ) | [virtual] |
This function will send the targets to the correct controllers.
- Parameters:
-
joint_name The Joint in joints_map you wish to send the target to. target The target in degree
- Returns:
- 0 if success ; -1 if error
Implements shadowrobot::SRArticulatedRobot.
Definition at line 247 of file etherCAT_compatibility_hand.cpp.
| short shadowrobot::EtherCATCompatibilityHand::setConfig | ( | std::vector< std::string > | myConfig | ) | [virtual] |
Set the config of the palm
- Todo:
- Not implemented yet
- Parameters:
-
myConfig
- Returns:
Implements shadowrobot::SRArticulatedRobot.
Definition at line 324 of file etherCAT_compatibility_hand.cpp.
| short shadowrobot::EtherCATCompatibilityHand::setContrl | ( | std::string | contrlr_name, |
| JointControllerData | ctrlr_data | ||
| ) | [virtual] |
Set the controller parameters for a given controller name.
- Parameters:
-
contrlr_name The name of the controller to setup. ctrlr_data The data to pass to this controller.
- Returns:
- 0 if success.
Implements shadowrobot::SRArticulatedRobot.
Definition at line 311 of file etherCAT_compatibility_hand.cpp.
Member Data Documentation
std::vector< ros::Publisher > shadowrobot::EtherCATCompatibilityHand::etherCAT_publishers [protected] |
This vector stores publishers to each joint controller.
Definition at line 113 of file etherCAT_compatibility_hand.hpp.
a subscriber for the /joint_states topic.
Definition at line 116 of file etherCAT_compatibility_hand.hpp.
Definition at line 87 of file etherCAT_compatibility_hand.hpp.
Definition at line 87 of file etherCAT_compatibility_hand.hpp.
The documentation for this class was generated from the following files: