#include <ros/ros.h>#include <moveit/move_group_interface/move_group.h>#include <moveit_simple_grasps/simple_grasps.h>#include <moveit_simple_grasps/grasp_data.h>#include <moveit_visual_tools/moveit_visual_tools.h>#include <moveit/robot_state/robot_state.h>#include <moveit/robot_state/conversions.h>#include "romeo_moveit_actions/metablock.hpp"#include "romeo_moveit_actions/postures.hpp"
Include dependency graph for action.hpp:

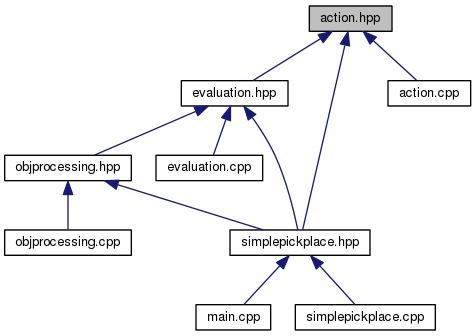
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | moveit_simple_actions::Action |
| Class for motion planning based on move_group. More... | |
Namespaces | |
| namespace | moveit_simple_actions |
Defines | |
| #define | FLAG_MOVE 2 |
| #define | FLAG_NO_MOVE 1 |
Define Documentation
| #define FLAG_MOVE 2 |
Definition at line 41 of file action.hpp.
| #define FLAG_NO_MOVE 1 |
Definition at line 40 of file action.hpp.