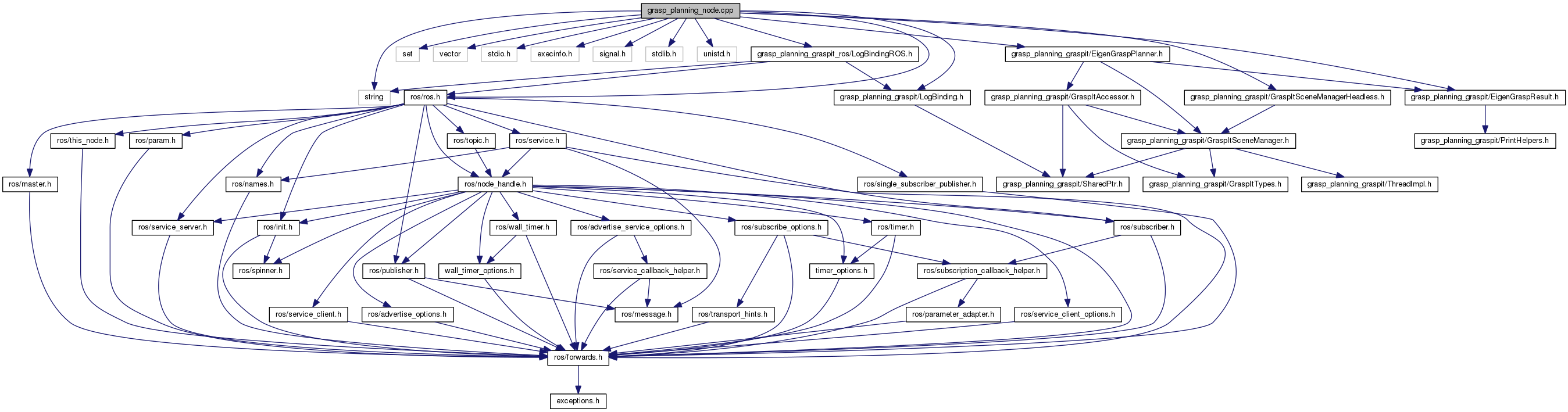
#include <string>#include <set>#include <vector>#include <stdio.h>#include <execinfo.h>#include <signal.h>#include <stdlib.h>#include <unistd.h>#include <ros/ros.h>#include <grasp_planning_graspit/GraspItSceneManagerHeadless.h>#include <grasp_planning_graspit/LogBinding.h>#include <grasp_planning_graspit/EigenGraspPlanner.h>#include <grasp_planning_graspit/EigenGraspResult.h>#include <grasp_planning_graspit_ros/LogBindingROS.h>
Include dependency graph for grasp_planning_node.cpp:
Go to the source code of this file.
Functions | |
| void | handler (int sig) |
| int | main (int argc, char **argv) |
| void | print_trace (void) |
Function Documentation
| void handler | ( | int | sig | ) |
Definition at line 63 of file grasp_planning_node.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Accepts following ROS parameters within the nodes private namespace:
- "use_world_file": set to true if a world file is to be loaded. Alternatively, a robot and object may be loaded separately.
- "graspit_world_file": the graspit world file. Use EITHER this OR specify a robot and object.
- "graspit_robot_file": the graspit robot file. Use EITHER this OR specify a world. if you specify a robot, you also have to specify an object.
- "graspit_object_file: the graspit object file. if you specify an object, you also have to specify a robot.
- "graspit_planning_algorithm": The planning algorithm to use. At this stage, only simulated annealing ("SimAnn") is supported.
- "max_planning_steps": the maximum planning steps to use for the Eigengrasp planner.
- "results_output_directory": the directory where results should be saved
- "save_result_files_inventor": a boolean flag specifying whether to save the results as inventor files in the folder specified in "results_output_directory".
- "save_result_files_graspit": a boolean flag specifying whether to save the results as graspit world files in the folder specified in "results_output_directory".
Definition at line 89 of file grasp_planning_node.cpp.
| void print_trace | ( | void | ) |
Helper method to print the trace in case of a SIG* event
Definition at line 44 of file grasp_planning_node.cpp.