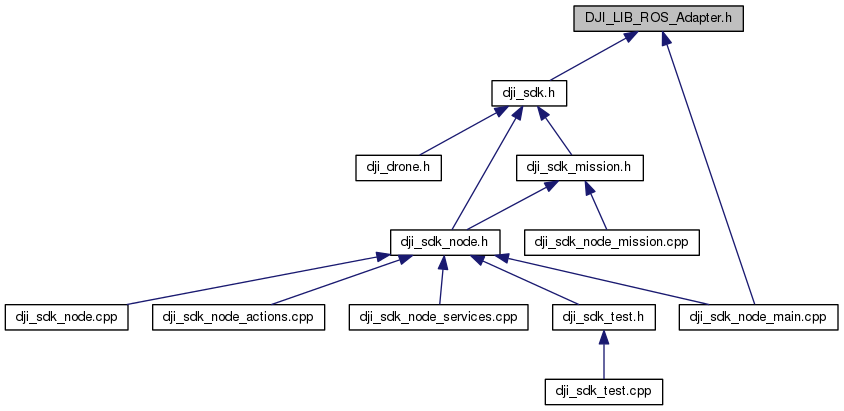
ROS Adapter to communicate with CoreAPI. More...
#include "DJI_HardDriver_Manifold.h"#include <dji_sdk_lib/DJI_API.h>#include <dji_sdk_lib/DJI_Flight.h>#include <dji_sdk_lib/DJI_Camera.h>#include <dji_sdk_lib/DJI_VirtualRC.h>#include <dji_sdk_lib/DJI_WayPoint.h>#include <dji_sdk_lib/DJI_HotPoint.h>#include <dji_sdk_lib/DJI_Follow.h>#include <ros/ros.h>#include <stdlib.h>#include <string>#include <pthread.h>#include <functional>
Go to the source code of this file.
Classes | |
| class | DJI::onboardSDK::ROSAdapter |
Namespaces | |
| namespace | DJI |
| namespace | DJI::onboardSDK |
Defines | |
| #define | A3_HAS_BATTERY 0x1000 |
| #define | A3_HAS_DEVICE 0x2000 |
| #define | A3_HAS_GIMBAL 0x0400 |
| #define | A3_HAS_GPS 0x0040 |
| #define | A3_HAS_MAG 0x0100 |
| #define | A3_HAS_RC 0x0200 |
| #define | A3_HAS_RTK 0x0080 |
| #define | A3_HAS_STATUS 0x0800 |
| #define | HAS_A 0x0004 |
| #define | HAS_BATTERY 0x0400 |
| #define | HAS_DEVICE 0x0800 |
| #define | HAS_GIMBAL 0x0100 |
| #define | HAS_MAG 0x0040 |
| #define | HAS_POS 0x0020 |
| #define | HAS_Q 0x0002 |
| #define | HAS_RC 0x0080 |
| #define | HAS_STATUS 0x0200 |
| #define | HAS_TIME 0x0001 |
| #define | HAS_V 0x0008 |
| #define | HAS_W 0x0010 |
Detailed Description
ROS Adapter to communicate with CoreAPI.
- Version:
- 3.1.8
- Date:
- July 29th, 2016
- Copyright:
- 2016 DJI. All rights reserved.
Definition in file DJI_LIB_ROS_Adapter.h.
Define Documentation
| #define A3_HAS_BATTERY 0x1000 |
Definition at line 36 of file DJI_LIB_ROS_Adapter.h.
| #define A3_HAS_DEVICE 0x2000 |
Definition at line 37 of file DJI_LIB_ROS_Adapter.h.
| #define A3_HAS_GIMBAL 0x0400 |
Definition at line 34 of file DJI_LIB_ROS_Adapter.h.
| #define A3_HAS_GPS 0x0040 |
Definition at line 30 of file DJI_LIB_ROS_Adapter.h.
| #define A3_HAS_MAG 0x0100 |
Definition at line 32 of file DJI_LIB_ROS_Adapter.h.
| #define A3_HAS_RC 0x0200 |
Definition at line 33 of file DJI_LIB_ROS_Adapter.h.
| #define A3_HAS_RTK 0x0080 |
Definition at line 31 of file DJI_LIB_ROS_Adapter.h.
| #define A3_HAS_STATUS 0x0800 |
Definition at line 35 of file DJI_LIB_ROS_Adapter.h.
| #define HAS_A 0x0004 |
Definition at line 16 of file DJI_LIB_ROS_Adapter.h.
| #define HAS_BATTERY 0x0400 |
Definition at line 26 of file DJI_LIB_ROS_Adapter.h.
| #define HAS_DEVICE 0x0800 |
Definition at line 27 of file DJI_LIB_ROS_Adapter.h.
| #define HAS_GIMBAL 0x0100 |
Definition at line 24 of file DJI_LIB_ROS_Adapter.h.
| #define HAS_MAG 0x0040 |
Definition at line 22 of file DJI_LIB_ROS_Adapter.h.
| #define HAS_POS 0x0020 |
Definition at line 19 of file DJI_LIB_ROS_Adapter.h.
| #define HAS_Q 0x0002 |
Definition at line 15 of file DJI_LIB_ROS_Adapter.h.
| #define HAS_RC 0x0080 |
Definition at line 23 of file DJI_LIB_ROS_Adapter.h.
| #define HAS_STATUS 0x0200 |
Definition at line 25 of file DJI_LIB_ROS_Adapter.h.
| #define HAS_TIME 0x0001 |
Definition at line 14 of file DJI_LIB_ROS_Adapter.h.
| #define HAS_V 0x0008 |
Definition at line 17 of file DJI_LIB_ROS_Adapter.h.
| #define HAS_W 0x0010 |
Definition at line 18 of file DJI_LIB_ROS_Adapter.h.