Classes |
| class | DJI::onboardSDK::CoreAPI |
| | CoreAPI implements core Open Protocol communication between M100/M600/A3 and your onboard embedded platform. More...
|
Namespaces |
| namespace | DJI |
| namespace | DJI::onboardSDK |
Enumerations |
| enum | DJI::onboardSDK::ACK_ACTIVE_CODE {
DJI::onboardSDK::ACK_ACTIVE_SUCCESS = 0x0000,
DJI::onboardSDK::ACK_ACTIVE_PARAMETER_ERROR = 0x0001,
DJI::onboardSDK::ACK_ACTIVE_ENCODE_ERROR = 0x0002,
DJI::onboardSDK::ACK_ACTIVE_NEW_DEVICE = 0x0003,
DJI::onboardSDK::ACK_ACTIVE_APP_NOT_CONNECTED = 0x0004,
DJI::onboardSDK::ACK_ACTIVE_NO_INTERNET = 0x0005,
DJI::onboardSDK::ACK_ACTIVE_SERVER_REFUSED = 0x0006,
DJI::onboardSDK::ACK_ACTIVE_ACCESS_LEVEL_ERROR = 0x0007,
DJI::onboardSDK::ACK_ACTIVE_VERSION_ERROR = 0x0008
} |
| enum | DJI::onboardSDK::ACK_ARM_CODE { DJI::onboardSDK::ACK_ARM_SUCCESS = 0x0000,
DJI::onboardSDK::ACK_ARM_NEED_CONTROL = 0x0001,
DJI::onboardSDK::ACK_ARM_ALREADY_ARMED = 0x0002,
DJI::onboardSDK::ACK_ARM_IN_AIR = 0x0003
} |
| enum | DJI::onboardSDK::ACK_COMMON_CODE {
DJI::onboardSDK::ACK_COMMON_SUCCESS = 0x0000,
DJI::onboardSDK::ACK_COMMON_KEYERROR = 0xFF00,
DJI::onboardSDK::ACK_COMMON_NO_AUTHORIZATION = 0xFF01,
DJI::onboardSDK::ACK_COMMON_NO_RIGHTS = 0xFF02,
DJI::onboardSDK::ACK_COMMON_NO_RESPONSE = 0xFFFF
} |
| enum | DJI::onboardSDK::ACK_ERROR_CODE { DJI::onboardSDK::ACK_SUCCESS = 0x0000,
DJI::onboardSDK::ACK_PARAM_ERROR = 0x0001
} |
| enum | DJI::onboardSDK::ACK_SETCONTROL_CODE {
DJI::onboardSDK::ACK_SETCONTROL_ERROR_MODE = 0x0000,
DJI::onboardSDK::ACK_SETCONTROL_RELEASE_SUCCESS = 0x0001,
DJI::onboardSDK::ACK_SETCONTROL_OBTAIN_SUCCESS = 0x0002,
DJI::onboardSDK::ACK_SETCONTROL_OBTAIN_RUNNING = 0x0003,
DJI::onboardSDK::ACK_SETCONTROL_RELEASE_RUNNING = 0x0004,
DJI::onboardSDK::ACK_SETCONTROL_NEED_MODE_F = 0x0006,
DJI::onboardSDK::ACK_SETCONTROL_NEED_MODE_P = 0x0005,
DJI::onboardSDK::ACK_SETCONTROL_IOC = 0x00C9
} |
| enum | DJI::onboardSDK::ACTIVATION_CODE { DJI::onboardSDK::CODE_GETVERSION = 0,
DJI::onboardSDK::CODE_ACTIVATE = 1,
DJI::onboardSDK::CODE_FREQUENCY = 0x10,
DJI::onboardSDK::CODE_TOMOBILE = 0xFE
} |
| enum | DJI::onboardSDK::BROADCAST_CODE {
DJI::onboardSDK::CODE_BROADCAST = 0x00,
DJI::onboardSDK::CODE_LOSTCTRL = 0x01,
DJI::onboardSDK::CODE_FROMMOBILE = 0x02,
DJI::onboardSDK::CODE_MISSION = 0x03,
DJI::onboardSDK::CODE_WAYPOINT = 0x04
} |
| enum | DJI::onboardSDK::BROADCAST_FREQ {
DJI::onboardSDK::BROADCAST_FREQ_0HZ = 0,
DJI::onboardSDK::BROADCAST_FREQ_1HZ = 1,
DJI::onboardSDK::BROADCAST_FREQ_10HZ = 2,
DJI::onboardSDK::BROADCAST_FREQ_50HZ = 3,
DJI::onboardSDK::BROADCAST_FREQ_100HZ = 4,
DJI::onboardSDK::BROADCAST_FREQ_HOLD = 5
} |
| enum | DJI::onboardSDK::CMD_SET {
DJI::onboardSDK::SET_ACTIVATION = 0x00,
DJI::onboardSDK::SET_CONTROL = 0x01,
DJI::onboardSDK::SET_BROADCAST = 0x02,
DJI::onboardSDK::SET_MISSION = 0x03,
DJI::onboardSDK::SET_SYNC = 0x04,
DJI::onboardSDK::SET_VIRTUALRC = 0x05
} |
| enum | DJI::onboardSDK::CONTROL_CODE {
DJI::onboardSDK::CODE_SETCONTROL = 0,
DJI::onboardSDK::CODE_TASK = 1,
DJI::onboardSDK::CODE_STATUS = 2,
DJI::onboardSDK::CODE_CONTROL = 3,
DJI::onboardSDK::CODE_SETARM = 5
} |
| enum | DJI::onboardSDK::FOLLOW_CODE { DJI::onboardSDK::CODE_FOLLOW_START = 0x30,
DJI::onboardSDK::CODE_FOLLOW_STOP = 0x31,
DJI::onboardSDK::CODE_FOLLOW_SETPAUSE = 0X32,
DJI::onboardSDK::CODE_FOLLOW_TARGET = 0X33
} |
| enum | DJI::onboardSDK::HOTPOINT_CODE {
DJI::onboardSDK::CODE_HOTPOINT_START = 0x20,
DJI::onboardSDK::CODE_HOTPOINT_STOP = 0x21,
DJI::onboardSDK::CODE_HOTPOINT_SETPAUSE = 0x22,
DJI::onboardSDK::CODE_HOTPOINT_YAWRATE = 0x23,
DJI::onboardSDK::CODE_HOTPOINT_RADIUS = 0x24,
DJI::onboardSDK::CODE_HOTPOINT_SETYAW = 0x25,
DJI::onboardSDK::CODE_HOTPOINT_LOAD = 0x26
} |
| enum | DJI::onboardSDK::MISSION_TYPE {
DJI::onboardSDK::MISSION_MODE_A,
DJI::onboardSDK::MISSION_WAYPOINT,
DJI::onboardSDK::MISSION_HOTPOINT,
DJI::onboardSDK::MISSION_FOLLOW,
DJI::onboardSDK::MISSION_IOC
} |
| enum | DJI::onboardSDK::SYNC_CODE { DJI::onboardSDK::CODE_SYNC_BROADCAST = 0x00
} |
| enum | DJI::onboardSDK::TASK_ACK_CODE { DJI::onboardSDK::TASK_FAILURE = 0x01,
DJI::onboardSDK::TASK_SUCCESS = 0x02
} |
| enum | DJI::onboardSDK::VIRTUALRC_CODE { DJI::onboardSDK::CODE_VIRTUALRC_SETTINGS,
DJI::onboardSDK::CODE_VIRTUALRC_DATA
} |
| enum | DJI::onboardSDK::WAYPOINT_CODE {
DJI::onboardSDK::CODE_WAYPOINT_INIT = 0x10,
DJI::onboardSDK::CODE_WAYPOINT_ADDPOINT = 0x11,
DJI::onboardSDK::CODE_WAYPOINT_SETSTART = 0x12,
DJI::onboardSDK::CODE_WAYPOINT_SETPAUSE = 0x13,
DJI::onboardSDK::CODE_WAYPOINT_DOWNLOAD = 0x14,
DJI::onboardSDK::CODE_WAYPOINT_INDEX = 0x15,
DJI::onboardSDK::CODE_WAYPOINT_SETVELOCITY = 0x16,
DJI::onboardSDK::CODE_WAYPOINT_GETVELOCITY = 0x17
} |
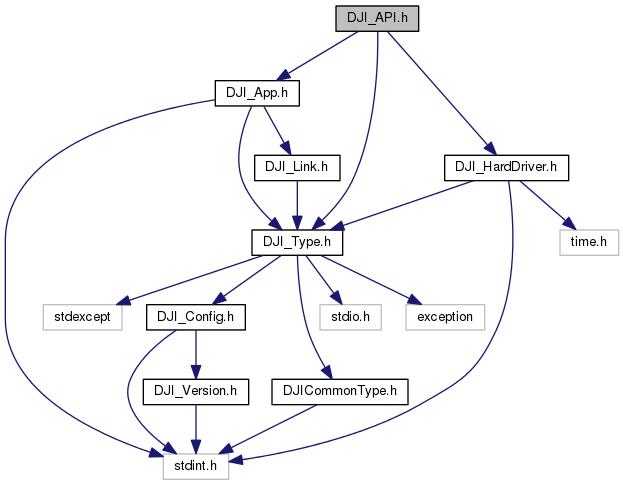
Core API for DJI onboardSDK library.
- Version:
- 3.1.7
- Date:
- July 1st, 2016
- Copyright:
- 2016 DJI. All rights reserved.
Definition in file DJI_API.h.