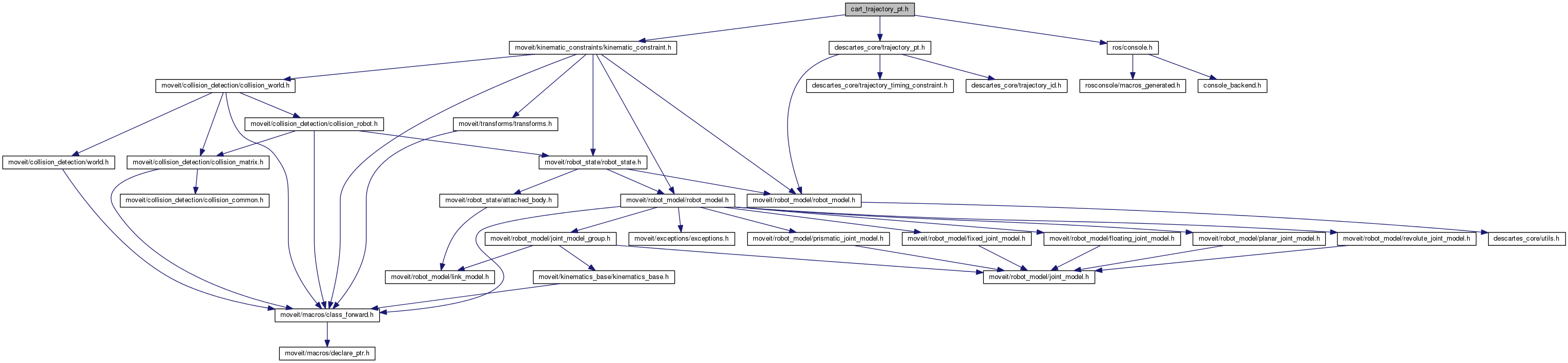
#include <moveit/kinematic_constraints/kinematic_constraint.h>#include "descartes_core/trajectory_pt.h"#include "ros/console.h"
Include dependency graph for cart_trajectory_pt.h:
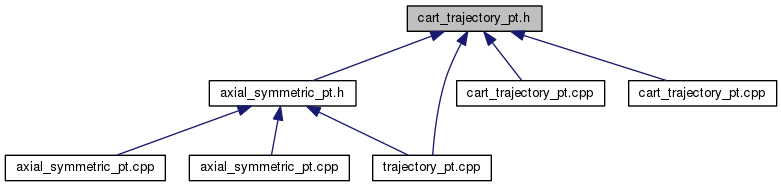
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | descartes_trajectory::CartTrajectoryPt |
| Cartesian Trajectory Point used to describe a Cartesian goal for a robot trajectory. More... | |
| struct | descartes_trajectory::OrientationTolerance |
| Description of a per-axis rotational tolerance on orientation Combined with OrientationConstraint to fully define pt orientation. More... | |
| struct | descartes_trajectory::PositionTolerance |
| Description of a per-cartesian-axis linear tolerance on position Combined with PositionConstraint to fully define pt position. More... | |
| struct | descartes_trajectory::ToleranceBase |
| Description of a per-cartesian-axis tolerance. This tolerance is not meant to be used directly but rather used as a common base for positional/orientation tolerances. More... | |
| struct | descartes_trajectory::TolerancedFrame |
| TolerancedFrame extends frame to include tolerances and constraints on position and orientation. Samplers that are called on this object should sample within tolerance, and check if result satisfies constraints. More... | |
Namespaces | |
| namespace | descartes_trajectory |
Typedefs | |
| typedef boost::shared_ptr < kinematic_constraints::OrientationConstraint > | OrientationConstraintPtr |
| typedef boost::shared_ptr < kinematic_constraints::PositionConstraint > | PositionConstraintPtr |
Typedef Documentation
| typedef boost::shared_ptr<kinematic_constraints::OrientationConstraint> OrientationConstraintPtr |
Definition at line 33 of file cart_trajectory_pt.h.
| typedef boost::shared_ptr<kinematic_constraints::PositionConstraint> PositionConstraintPtr |
Definition at line 32 of file cart_trajectory_pt.h.