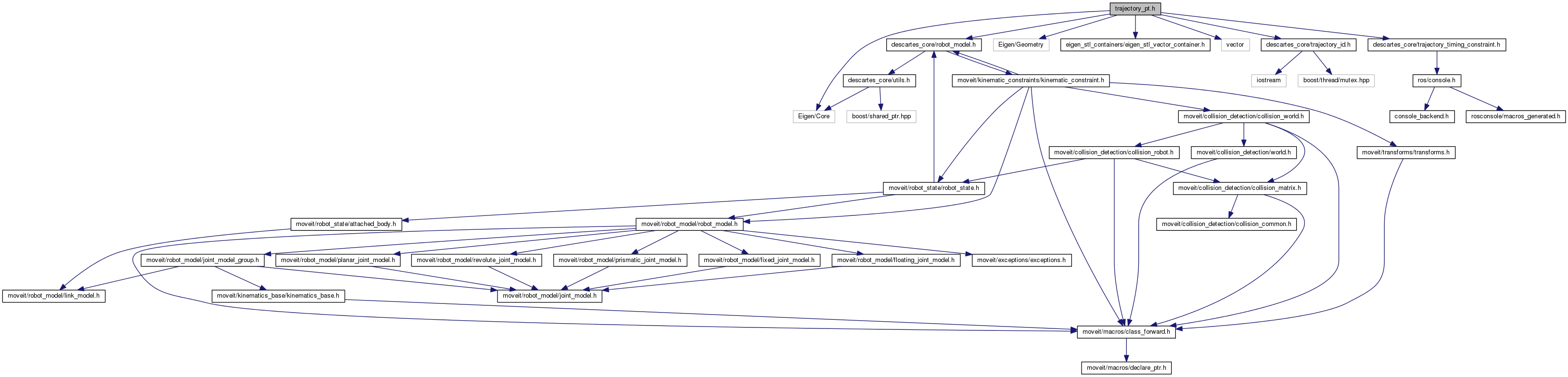
#include <Eigen/Core>#include <Eigen/Geometry>#include <eigen_stl_containers/eigen_stl_vector_container.h>#include <vector>#include "descartes_core/robot_model.h"#include "descartes_core/trajectory_id.h"#include "descartes_core/trajectory_timing_constraint.h"
Include dependency graph for trajectory_pt.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| struct | descartes_core::Frame |
| Frame is a wrapper for an affine frame transform. Frame inverse can also be stored for increased speed in downstream calculations. More... | |
| class | descartes_core::TrajectoryPt |
Namespaces | |
| namespace | descartes_core |
Functions | |
| descartes_core::DESCARTES_CLASS_FORWARD (TrajectoryPt) | |
| A TrajectoryPt is the basis for a Trajectory describing the desired path a robot should execute. The desired robot motion spans both Cartesian and Joint space, and so the TrajectoryPt must have capability to report on both these properties. | |