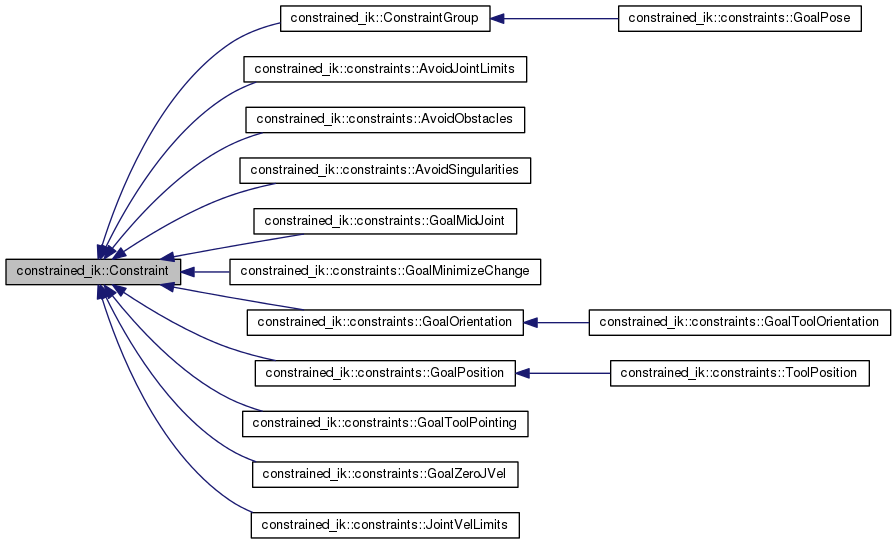
Base class for IK-solver Constraints Specify relationship between joint velocities and constraint "error". More...
#include <constraint.h>
Classes | |
| struct | ConstraintData |
| This structure is to be used by all constraints to store specific data that needs to get updated every iteration of the solver. More... | |
Public Member Functions | |
| virtual constrained_ik::ConstraintResults | evalConstraint (const SolverState &state) const =0 |
| Pure definition for calculating constraint error, jacobian & status. | |
| virtual void | init (const Constrained_IK *ik) |
| Initialize constraint and should be called by any inheriting classes. | |
| virtual void | loadParameters (const XmlRpc::XmlRpcValue &constraint_xml) |
| Load constraint parameters from XmlRpc::XmlRpcValue. | |
| void | setDebug (bool debug=true) |
| set debug mode | |
Protected Member Functions | |
| virtual int | numJoints () const |
| Returns the number of joints. | |
Protected Attributes | |
| bool | debug_ |
| const Constrained_IK * | ik_ |
| bool | initialized_ |
Detailed Description
Base class for IK-solver Constraints Specify relationship between joint velocities and constraint "error".
Definition at line 48 of file constraint.h.
Member Function Documentation
| virtual constrained_ik::ConstraintResults constrained_ik::Constraint::evalConstraint | ( | const SolverState & | state | ) | const [pure virtual] |
Pure definition for calculating constraint error, jacobian & status.
- Parameters:
-
state solvers current state
- Returns:
- ConstraintResults
Implemented in constrained_ik::constraints::AvoidObstacles, constrained_ik::constraints::AvoidJointLimits, constrained_ik::constraints::JointVelLimits, constrained_ik::constraints::AvoidSingularities, constrained_ik::constraints::GoalPosition, constrained_ik::constraints::GoalToolPointing, constrained_ik::constraints::GoalOrientation, constrained_ik::constraints::GoalMidJoint, constrained_ik::constraints::GoalToolOrientation, constrained_ik::constraints::GoalZeroJVel, constrained_ik::constraints::ToolPosition, constrained_ik::constraints::GoalMinimizeChange, and constrained_ik::ConstraintGroup.
| virtual void constrained_ik::Constraint::init | ( | const Constrained_IK * | ik | ) | [inline, virtual] |
Initialize constraint and should be called by any inheriting classes.
- Parameters:
-
ik Pointer to Constrained_IK
Reimplemented in constrained_ik::constraints::AvoidObstacles, constrained_ik::constraints::AvoidJointLimits, constrained_ik::constraints::JointVelLimits, constrained_ik::constraints::GoalMidJoint, and constrained_ik::ConstraintGroup.
Definition at line 84 of file constraint.h.
| virtual void constrained_ik::Constraint::loadParameters | ( | const XmlRpc::XmlRpcValue & | constraint_xml | ) | [inline, virtual] |
Load constraint parameters from XmlRpc::XmlRpcValue.
- Parameters:
-
constraint_xml XmlRpc::XmlRpcValue
Reimplemented in constrained_ik::constraints::AvoidObstacles, constrained_ik::constraints::AvoidJointLimits, constrained_ik::constraints::JointVelLimits, constrained_ik::constraints::AvoidSingularities, constrained_ik::constraints::GoalPosition, constrained_ik::constraints::GoalToolPointing, constrained_ik::constraints::GoalOrientation, constrained_ik::constraints::GoalMidJoint, constrained_ik::constraints::GoalZeroJVel, and constrained_ik::constraints::GoalMinimizeChange.
Definition at line 90 of file constraint.h.
| int constrained_ik::Constraint::numJoints | ( | ) | const [protected, virtual] |
Returns the number of joints.
- Returns:
- number of joints
Definition at line 37 of file constraint.cpp.
| void constrained_ik::Constraint::setDebug | ( | bool | debug = true | ) | [inline] |
set debug mode
- Parameters:
-
debug Value to set debug_ to (defaults to true)
Definition at line 96 of file constraint.h.
Member Data Documentation
bool constrained_ik::Constraint::debug_ [protected] |
Provide control over if certain print statements are output
Definition at line 100 of file constraint.h.
const Constrained_IK* constrained_ik::Constraint::ik_ [protected] |
Pointer to parent solver
Definition at line 101 of file constraint.h.
bool constrained_ik::Constraint::initialized_ [protected] |
True if solver is intialized, otherwise false
Definition at line 99 of file constraint.h.
The documentation for this class was generated from the following files: