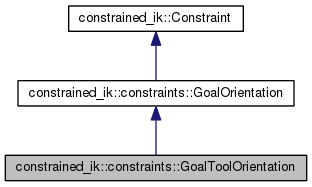
Constraint to specify cartesian goal tool orientation (XYZ rotation) More...
#include <goal_tool_orientation.h>
Public Member Functions | |
| Eigen::VectorXd | calcError (const GoalOrientationData &cdata) const override |
| Rotation to get from current orientation to goal orientation Resolve into primary vectors (x,y,z) of tool coordinate system Each element is multiplied by corresponding element in weight_. | |
| Eigen::MatrixXd | calcJacobian (const GoalOrientationData &cdata) const override |
| Jacobian is the last three rows of standard jacobian (in tool frame). Equivalent to each axis of rotation expressed in tool frame coordinates. Each row is scaled by the corresponding element of weight_. | |
| constrained_ik::ConstraintResults | evalConstraint (const SolverState &state) const override |
| see base class for documentation | |
Detailed Description
Constraint to specify cartesian goal tool orientation (XYZ rotation)
- Examples:
- All examples are located here Goal Tool Orientation Constraint Examples
Definition at line 43 of file goal_tool_orientation.h.
Member Function Documentation
| Eigen::VectorXd constrained_ik::constraints::GoalToolOrientation::calcError | ( | const GoalOrientationData & | cdata | ) | const [override, virtual] |
Rotation to get from current orientation to goal orientation Resolve into primary vectors (x,y,z) of tool coordinate system Each element is multiplied by corresponding element in weight_.
- Parameters:
-
cdata The constraint specific data.
- Returns:
- Rotation from current to goal expressed in tool frame, scaled by weight_
Reimplemented from constrained_ik::constraints::GoalOrientation.
Definition at line 56 of file goal_tool_orientation.cpp.
| Eigen::MatrixXd constrained_ik::constraints::GoalToolOrientation::calcJacobian | ( | const GoalOrientationData & | cdata | ) | const [override, virtual] |
Jacobian is the last three rows of standard jacobian (in tool frame). Equivalent to each axis of rotation expressed in tool frame coordinates. Each row is scaled by the corresponding element of weight_.
- Parameters:
-
cdata The constraint specific data.
- Returns:
- Last 3 rows of standard jacobian expressed in tool frame, scaled by weight_
Reimplemented from constrained_ik::constraints::GoalOrientation.
Definition at line 67 of file goal_tool_orientation.cpp.
The documentation for this class was generated from the following files: