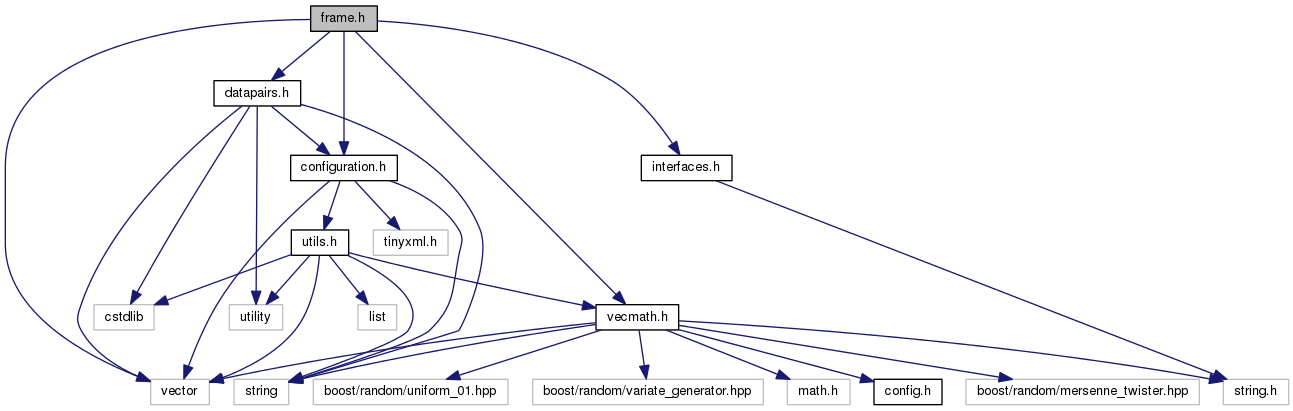
#include <vector>#include "configuration.h"#include "vecmath.h"#include "datapairs.h"#include "interfaces.h"
Include dependency graph for frame.h:
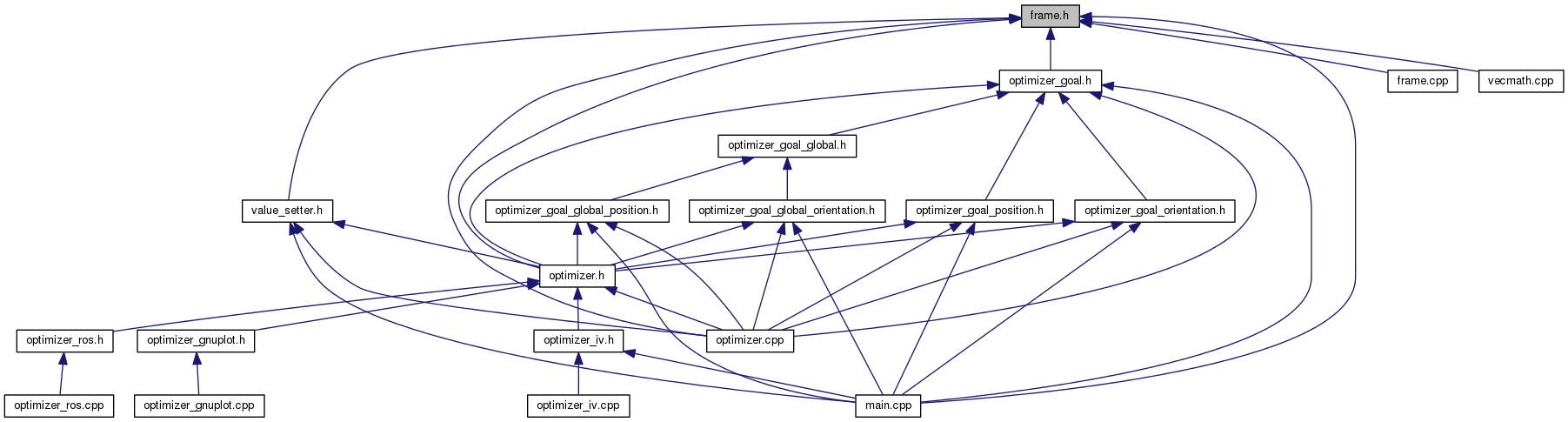
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | robotLibPbD::CDh |
| Denavit Hartenberg Link information. More... | |
| class | robotLibPbD::CFrame |
| Robot types with implemented inverse kinematics. More... | |
| class | robotLibPbD::CFrameCombination |
| Frame in cartesian space. More... | |
| class | robotLibPbD::CFrameContainer |
| class | robotLibPbD::CFrameInterface |
| class | robotLibPbD::CFrameReference |
| Frame in cartesian space. More... | |
| class | robotLibPbD::CKinematicChain |
| Kinematic chain. More... | |
| class | robotLibPbD::CKinematicChainContainer |
| Kinematic Robot Model. More... | |
Namespaces | |
| namespace | robotLibPbD |