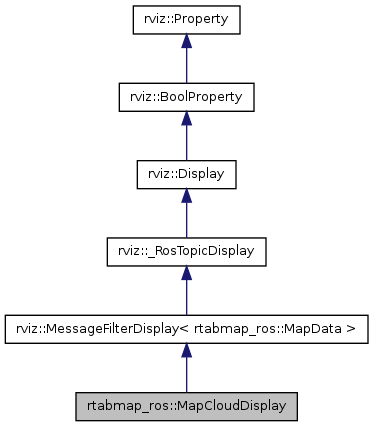
Displays point clouds from rtabmap::MapData. More...
#include <MapCloudDisplay.h>
Detailed Description
Displays point clouds from rtabmap::MapData.
By default it will assume channel 0 of the cloud is an intensity value, and will color them by intensity. If you set the channel's name to "rgb", it will interpret the channel as an integer rgb value, with r, g and b all being 8 bits.
Definition at line 70 of file MapCloudDisplay.h.
Member Typedef Documentation
| typedef boost::shared_ptr<CloudInfo> rtabmap_ros::MapCloudDisplay::CloudInfoPtr |
Definition at line 93 of file MapCloudDisplay.h.
typedef std::map<std::string, TransformerInfo> rtabmap_ros::MapCloudDisplay::M_TransformerInfo [private] |
Definition at line 177 of file MapCloudDisplay.h.
Constructor & Destructor Documentation
Definition at line 84 of file MapCloudDisplay.cpp.
| rtabmap_ros::MapCloudDisplay::~MapCloudDisplay | ( | ) | [virtual] |
Definition at line 178 of file MapCloudDisplay.cpp.
Member Function Documentation
| void rtabmap_ros::MapCloudDisplay::causeRetransform | ( | ) | [slot] |
Definition at line 582 of file MapCloudDisplay.cpp.
| void rtabmap_ros::MapCloudDisplay::downloadGraph | ( | ) | [private, slot] |
Definition at line 527 of file MapCloudDisplay.cpp.
| void rtabmap_ros::MapCloudDisplay::downloadMap | ( | ) | [private, slot] |
Definition at line 469 of file MapCloudDisplay.cpp.
| void rtabmap_ros::MapCloudDisplay::fillTransformerOptions | ( | rviz::EnumProperty * | prop, |
| uint32_t | mask | ||
| ) | [private] |
Definition at line 763 of file MapCloudDisplay.cpp.
| rviz::PointCloudTransformerPtr rtabmap_ros::MapCloudDisplay::getColorTransformer | ( | const sensor_msgs::PointCloud2ConstPtr & | cloud | ) | [private] |
Definition at line 804 of file MapCloudDisplay.cpp.
| rviz::PointCloudTransformerPtr rtabmap_ros::MapCloudDisplay::getXYZTransformer | ( | const sensor_msgs::PointCloud2ConstPtr & | cloud | ) | [private] |
Definition at line 788 of file MapCloudDisplay.cpp.
| void rtabmap_ros::MapCloudDisplay::loadTransformers | ( | ) | [private] |
Definition at line 188 of file MapCloudDisplay.cpp.
| void rtabmap_ros::MapCloudDisplay::onInitialize | ( | ) | [protected, virtual] |
Do initialization. Overridden from MessageFilterDisplay.
Reimplemented from rviz::MessageFilterDisplay< rtabmap_ros::MapData >.
Definition at line 223 of file MapCloudDisplay.cpp.
| void rtabmap_ros::MapCloudDisplay::processMapData | ( | const rtabmap_ros::MapData & | map | ) | [private] |
Definition at line 244 of file MapCloudDisplay.cpp.
| void rtabmap_ros::MapCloudDisplay::processMessage | ( | const rtabmap_ros::MapDataConstPtr & | cloud | ) | [protected, virtual] |
Process a single message. Overridden from MessageFilterDisplay.
Definition at line 237 of file MapCloudDisplay.cpp.
| void rtabmap_ros::MapCloudDisplay::reset | ( | ) | [virtual] |
Reimplemented from rviz::MessageFilterDisplay< rtabmap_ros::MapData >.
Definition at line 717 of file MapCloudDisplay.cpp.
| void rtabmap_ros::MapCloudDisplay::retransform | ( | ) | [private] |
Definition at line 821 of file MapCloudDisplay.cpp.
| void rtabmap_ros::MapCloudDisplay::setColorTransformerOptions | ( | EnumProperty * | prop | ) | [private, slot] |
Definition at line 758 of file MapCloudDisplay.cpp.
| void rtabmap_ros::MapCloudDisplay::setPropertiesHidden | ( | const QList< Property * > & | props, |
| bool | hide | ||
| ) | [private] |
Definition at line 339 of file MapCloudDisplay.cpp.
| void rtabmap_ros::MapCloudDisplay::setXyzTransformerOptions | ( | EnumProperty * | prop | ) | [private, slot] |
Definition at line 753 of file MapCloudDisplay.cpp.
| bool rtabmap_ros::MapCloudDisplay::transformCloud | ( | const CloudInfoPtr & | cloud, |
| bool | fully_update_transformers | ||
| ) | [private] |
Transforms the cloud into the correct frame, and sets up our renderable cloud.
Definition at line 834 of file MapCloudDisplay.cpp.
| void rtabmap_ros::MapCloudDisplay::update | ( | float | wall_dt, |
| float | ros_dt | ||
| ) | [virtual] |
Reimplemented from rviz::Display.
Definition at line 587 of file MapCloudDisplay.cpp.
| void rtabmap_ros::MapCloudDisplay::updateAlpha | ( | ) | [private, slot] |
Definition at line 417 of file MapCloudDisplay.cpp.
| void rtabmap_ros::MapCloudDisplay::updateBillboardSize | ( | ) | [private, slot] |
Definition at line 445 of file MapCloudDisplay.cpp.
| void rtabmap_ros::MapCloudDisplay::updateCloudParameters | ( | ) | [private, slot] |
Definition at line 464 of file MapCloudDisplay.cpp.
| void rtabmap_ros::MapCloudDisplay::updateColorTransformer | ( | ) | [private, slot] |
Definition at line 742 of file MapCloudDisplay.cpp.
| void rtabmap_ros::MapCloudDisplay::updateStyle | ( | ) | [private, slot] |
Definition at line 425 of file MapCloudDisplay.cpp.
| void rtabmap_ros::MapCloudDisplay::updateTransformers | ( | const sensor_msgs::PointCloud2ConstPtr & | cloud | ) | [private] |
Definition at line 347 of file MapCloudDisplay.cpp.
| void rtabmap_ros::MapCloudDisplay::updateXyzTransformer | ( | ) | [private, slot] |
Definition at line 731 of file MapCloudDisplay.cpp.
Member Data Documentation
Definition at line 103 of file MapCloudDisplay.h.
Definition at line 158 of file MapCloudDisplay.h.
Definition at line 107 of file MapCloudDisplay.h.
Definition at line 110 of file MapCloudDisplay.h.
std::map<int, CloudInfoPtr> rtabmap_ros::MapCloudDisplay::cloud_infos_ [private] |
Definition at line 160 of file MapCloudDisplay.h.
Definition at line 108 of file MapCloudDisplay.h.
Definition at line 109 of file MapCloudDisplay.h.
Definition at line 105 of file MapCloudDisplay.h.
std::map<int, rtabmap::Transform> rtabmap_ros::MapCloudDisplay::current_map_ [private] |
Definition at line 165 of file MapCloudDisplay.h.
boost::mutex rtabmap_ros::MapCloudDisplay::current_map_mutex_ [private] |
Definition at line 166 of file MapCloudDisplay.h.
Definition at line 114 of file MapCloudDisplay.h.
Definition at line 113 of file MapCloudDisplay.h.
bool rtabmap_ros::MapCloudDisplay::needs_retransform_ [private] |
Definition at line 183 of file MapCloudDisplay.h.
std::map<int, CloudInfoPtr> rtabmap_ros::MapCloudDisplay::new_cloud_infos_ [private] |
Definition at line 162 of file MapCloudDisplay.h.
boost::mutex rtabmap_ros::MapCloudDisplay::new_clouds_mutex_ [private] |
Definition at line 163 of file MapCloudDisplay.h.
bool rtabmap_ros::MapCloudDisplay::new_color_transformer_ [private] |
Definition at line 182 of file MapCloudDisplay.h.
bool rtabmap_ros::MapCloudDisplay::new_xyz_transformer_ [private] |
Definition at line 181 of file MapCloudDisplay.h.
Definition at line 112 of file MapCloudDisplay.h.
Definition at line 111 of file MapCloudDisplay.h.
Definition at line 102 of file MapCloudDisplay.h.
Definition at line 101 of file MapCloudDisplay.h.
Definition at line 157 of file MapCloudDisplay.h.
Definition at line 106 of file MapCloudDisplay.h.
pluginlib::ClassLoader<rviz::PointCloudTransformer>* rtabmap_ros::MapCloudDisplay::transformer_class_loader_ [private] |
Definition at line 185 of file MapCloudDisplay.h.
Definition at line 180 of file MapCloudDisplay.h.
boost::recursive_mutex rtabmap_ros::MapCloudDisplay::transformers_mutex_ [private] |
Definition at line 179 of file MapCloudDisplay.h.
Definition at line 104 of file MapCloudDisplay.h.
The documentation for this class was generated from the following files: