Bilateral filtering implementation, based on the following paper: * Kopf, Johannes and Cohen, Michael F. and Lischinski, Dani and Uyttendaele, Matt - Joint Bilateral Upsampling, * ACM Transations in Graphics, July 2007. More...
#include <bilateral_upsampling.h>
Public Types | |
| typedef boost::shared_ptr < const BilateralUpsampling < PointInT, PointOutT > > | ConstPtr |
| typedef pcl::PointCloud < PointOutT > | PointCloudOut |
| typedef boost::shared_ptr < BilateralUpsampling < PointInT, PointOutT > > | Ptr |
Public Member Functions | |
| BilateralUpsampling () | |
| Constructor. | |
| Eigen::Matrix3f | getProjectionMatrix () const |
| Returns the current projection matrix. | |
| float | getSigmaColor () const |
| Returns the current sigma color value. | |
| float | getSigmaDepth () const |
| Returns the current sigma depth value. | |
| int | getWindowSize () const |
| Returns the filter window size. | |
| void | process (pcl::PointCloud< PointOutT > &output) |
| Method that does the actual processing on the input cloud. | |
| void | setProjectionMatrix (const Eigen::Matrix3f &projection_matrix) |
| Method that sets the projection matrix to be used when unprojecting the points in the depth image back to (x,y,z) positions. | |
| void | setSigmaColor (const float &sigma_color) |
| Method that sets the sigma color parameter. | |
| void | setSigmaDepth (const float &sigma_depth) |
| Method that sets the sigma depth parameter. | |
| void | setWindowSize (int window_size) |
| Method that sets the window size for the filter. | |
Public Attributes | |
| Eigen::Matrix3f | KinectSXGAProjectionMatrix |
| Eigen::Matrix3f | KinectVGAProjectionMatrix |
Protected Member Functions | |
| void | performProcessing (pcl::PointCloud< PointOutT > &output) |
| Abstract cloud processing method. | |
Private Attributes | |
| Eigen::Matrix3f | projection_matrix_ |
| float | sigma_color_ |
| float | sigma_depth_ |
| Eigen::Matrix3f | unprojection_matrix_ |
| int | window_size_ |
Detailed Description
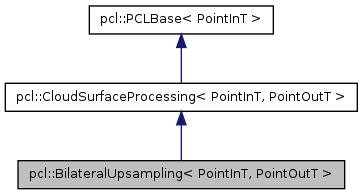
template<typename PointInT, typename PointOutT>
class pcl::BilateralUpsampling< PointInT, PointOutT >
Bilateral filtering implementation, based on the following paper: * Kopf, Johannes and Cohen, Michael F. and Lischinski, Dani and Uyttendaele, Matt - Joint Bilateral Upsampling, * ACM Transations in Graphics, July 2007.
Takes in a colored organized point cloud (i.e. PointXYZRGB or PointXYZRGBA), that might contain nan values for the depth information, and it will return an upsampled version of this cloud, based on the formula:
![\[ \tilde{S}_p = \frac{1}{k_p} \sum_{q_d \in \Omega} {S_{q_d} f(||p_d - q_d|| g(||\tilde{I}_p-\tilde{I}_q||}) \]](form_73.png)
where S is the depth image, I is the RGB image and f and g are Gaussian functions centered at 0 and with standard deviations  and
and 
Definition at line 63 of file bilateral_upsampling.h.
Member Typedef Documentation
| typedef boost::shared_ptr<const BilateralUpsampling<PointInT, PointOutT> > pcl::BilateralUpsampling< PointInT, PointOutT >::ConstPtr |
Reimplemented from pcl::CloudSurfaceProcessing< PointInT, PointOutT >.
Definition at line 67 of file bilateral_upsampling.h.
| typedef pcl::PointCloud<PointOutT> pcl::BilateralUpsampling< PointInT, PointOutT >::PointCloudOut |
Definition at line 75 of file bilateral_upsampling.h.
| typedef boost::shared_ptr<BilateralUpsampling<PointInT, PointOutT> > pcl::BilateralUpsampling< PointInT, PointOutT >::Ptr |
Reimplemented from pcl::CloudSurfaceProcessing< PointInT, PointOutT >.
Definition at line 66 of file bilateral_upsampling.h.
Constructor & Destructor Documentation
| pcl::BilateralUpsampling< PointInT, PointOutT >::BilateralUpsampling | ( | ) | [inline] |
Constructor.
Definition at line 80 of file bilateral_upsampling.h.
Member Function Documentation
| Eigen::Matrix3f pcl::BilateralUpsampling< PointInT, PointOutT >::getProjectionMatrix | ( | ) | const [inline] |
Returns the current projection matrix.
Definition at line 137 of file bilateral_upsampling.h.
| float pcl::BilateralUpsampling< PointInT, PointOutT >::getSigmaColor | ( | ) | const [inline] |
Returns the current sigma color value.
Definition at line 115 of file bilateral_upsampling.h.
| float pcl::BilateralUpsampling< PointInT, PointOutT >::getSigmaDepth | ( | ) | const [inline] |
Returns the current sigma depth value.
Definition at line 125 of file bilateral_upsampling.h.
| int pcl::BilateralUpsampling< PointInT, PointOutT >::getWindowSize | ( | ) | const [inline] |
Returns the filter window size.
Definition at line 105 of file bilateral_upsampling.h.
| void pcl::BilateralUpsampling< PointInT, PointOutT >::performProcessing | ( | pcl::PointCloud< PointOutT > & | output | ) | [protected, virtual] |
Abstract cloud processing method.
Implements pcl::CloudSurfaceProcessing< PointInT, PointOutT >.
Definition at line 86 of file bilateral_upsampling.hpp.
| void pcl::BilateralUpsampling< PointInT, PointOutT >::process | ( | pcl::PointCloud< PointOutT > & | output | ) | [virtual] |
Method that does the actual processing on the input cloud.
- Parameters:
-
[out] output the container of the resulting upsampled cloud
Reimplemented from pcl::CloudSurfaceProcessing< PointInT, PointOutT >.
Definition at line 48 of file bilateral_upsampling.hpp.
| void pcl::BilateralUpsampling< PointInT, PointOutT >::setProjectionMatrix | ( | const Eigen::Matrix3f & | projection_matrix | ) | [inline] |
Method that sets the projection matrix to be used when unprojecting the points in the depth image back to (x,y,z) positions.
- Note:
- There are 2 matrices already set in the class, used for the 2 modes available for the Kinect. They are tuned to be the same as the ones in the OpenNiGrabber
- Parameters:
-
[in] projection_matrix the new projection matrix to be set
Definition at line 133 of file bilateral_upsampling.h.
| void pcl::BilateralUpsampling< PointInT, PointOutT >::setSigmaColor | ( | const float & | sigma_color | ) | [inline] |
Method that sets the sigma color parameter.
- Parameters:
-
[in] sigma_color the new value to be set
Definition at line 111 of file bilateral_upsampling.h.
| void pcl::BilateralUpsampling< PointInT, PointOutT >::setSigmaDepth | ( | const float & | sigma_depth | ) | [inline] |
Method that sets the sigma depth parameter.
- Parameters:
-
[in] sigma_depth the new value to be set
Definition at line 121 of file bilateral_upsampling.h.
| void pcl::BilateralUpsampling< PointInT, PointOutT >::setWindowSize | ( | int | window_size | ) | [inline] |
Method that sets the window size for the filter.
- Parameters:
-
[in] window_size the given window size
Definition at line 101 of file bilateral_upsampling.h.
Member Data Documentation
| Eigen::Matrix3f pcl::BilateralUpsampling< PointInT, PointOutT >::KinectSXGAProjectionMatrix |
Definition at line 77 of file bilateral_upsampling.h.
| Eigen::Matrix3f pcl::BilateralUpsampling< PointInT, PointOutT >::KinectVGAProjectionMatrix |
Definition at line 77 of file bilateral_upsampling.h.
Eigen::Matrix3f pcl::BilateralUpsampling< PointInT, PointOutT >::projection_matrix_ [private] |
Definition at line 151 of file bilateral_upsampling.h.
float pcl::BilateralUpsampling< PointInT, PointOutT >::sigma_color_ [private] |
Definition at line 150 of file bilateral_upsampling.h.
float pcl::BilateralUpsampling< PointInT, PointOutT >::sigma_depth_ [private] |
Definition at line 150 of file bilateral_upsampling.h.
Eigen::Matrix3f pcl::BilateralUpsampling< PointInT, PointOutT >::unprojection_matrix_ [private] |
Definition at line 151 of file bilateral_upsampling.h.
int pcl::BilateralUpsampling< PointInT, PointOutT >::window_size_ [private] |
Definition at line 149 of file bilateral_upsampling.h.
The documentation for this class was generated from the following files: