BOARDLocalReferenceFrameEstimation implements the BOrder Aware Repeatable Directions algorithm for local reference frame estimation as described here: More...
#include <board.h>
Public Types | |
| typedef boost::shared_ptr < const BOARDLocalReferenceFrameEstimation < PointInT, PointNT, PointOutT > > | ConstPtr |
| typedef boost::shared_ptr < BOARDLocalReferenceFrameEstimation < PointInT, PointNT, PointOutT > > | Ptr |
Public Member Functions | |
| BOARDLocalReferenceFrameEstimation () | |
| Constructor. | |
| int | getCheckMarginArraySize () const |
| Gets the number of slices in which is divided the margin for the search of missing regions. | |
| bool | getFindHoles () const |
| Gets whether holes in the margin of the support, for each point, are searched and accounted for in the estimation of the Reference Frame or not. | |
| float | getHoleSizeProbThresh () const |
| Given the angle width of a hole in the support margin, gets the minimum percentage of a circumference this angle must cover to be considered a missing region in the support and hence used for the estimation of the Reference Frame. | |
| float | getMarginThresh () const |
| Gets the percentage of the search radius (or tangent radius if set) after which a point is considered part of the support margin. | |
| float | getSteepThresh () const |
| Gets the minimum steepness that the normals of the points situated on the borders of the hole, with reference to the normal of the best point found by the algorithm, must have in order to be considered in the calculation of the Reference Frame. | |
| float | getTangentRadius () const |
| Get the maximum distance of the points used to estimate the x_axis and y_axis of the BOARD Reference Frame for a given point. | |
| void | setCheckMarginArraySize (int size) |
| Sets the number of slices in which is divided the margin for the search of missing regions. | |
| void | setFindHoles (bool find_holes) |
| Sets whether holes in the margin of the support, for each point, are searched and accounted for in the estimation of the Reference Frame or not. | |
| void | setHoleSizeProbThresh (float prob_thresh) |
| Given the angle width of a hole in the support margin, sets the minimum percentage of a circumference this angle must cover to be considered a missing region in the support and hence used for the estimation of the Reference Frame. | |
| void | setMarginThresh (float margin_thresh) |
| Sets the percentage of the search radius (or tangent radius if set) after which a point is considered part of the support margin. | |
| void | setSteepThresh (float steep_thresh) |
| Sets the minimum steepness that the normals of the points situated on the borders of the hole, with reference to the normal of the best point found by the algorithm, must have in order to be considered in the calculation of the Reference Frame. | |
| void | setTangentRadius (float radius) |
| Set the maximum distance of the points used to estimate the x_axis and y_axis of the BOARD Reference Frame for a given point. | |
| virtual | ~BOARDLocalReferenceFrameEstimation () |
| Empty destructor. | |
Protected Types | |
| typedef Feature< PointInT, PointOutT >::PointCloudIn | PointCloudIn |
| typedef Feature< PointInT, PointOutT >::PointCloudOut | PointCloudOut |
Protected Member Functions | |
| bool | areEquals (float val1, float val2, float zero_float_eps=1E-8f) const |
| Check if val1 and val2 are equals. | |
| virtual void | computeFeature (PointCloudOut &output) |
| Abstract feature estimation method. | |
| float | computePointLRF (const int &index, Eigen::Matrix3f &lrf) |
| Estimate the LRF descriptor for a given point based on its spatial neighborhood of 3D points with normals. | |
| void | directedOrthogonalAxis (Eigen::Vector3f const &axis, Eigen::Vector3f const &axis_origin, Eigen::Vector3f const &point, Eigen::Vector3f &directed_ortho_axis) |
| Given an axis (with origin axis_origin), return the orthogonal axis directed to point. | |
| float | getAngleBetweenUnitVectors (Eigen::Vector3f const &v1, Eigen::Vector3f const &v2, Eigen::Vector3f const &axis) |
| return the angle (in radians) that rotate v1 to v2 with respect to axis . | |
| void | normalDisambiguation (pcl::PointCloud< PointNT > const &normals_cloud, std::vector< int > const &normal_indices, Eigen::Vector3f &normal) |
| Disambiguates a normal direction using adjacent normals. | |
| void | planeFitting (Eigen::Matrix< float, Eigen::Dynamic, 3 > const &points, Eigen::Vector3f ¢er, Eigen::Vector3f &norm) |
| Compute Least Square Plane Fitting in a set of 3D points. | |
| void | projectPointOnPlane (Eigen::Vector3f const &point, Eigen::Vector3f const &origin_point, Eigen::Vector3f const &plane_normal, Eigen::Vector3f &projected_point) |
| Given a plane (origin and normal) and a point, return the projection of x on plane. | |
| void | randomOrthogonalAxis (Eigen::Vector3f const &axis, Eigen::Vector3f &rand_ortho_axis) |
| Given an axis, return a random orthogonal axis. | |
| void | resetData () |
Private Attributes | |
| std::vector< bool > | check_margin_array_ |
| int | check_margin_array_size_ |
| Number of slices that divide the support in order to determine if a missing region is present. | |
| bool | find_holes_ |
| If true, check if support is complete or has missing regions because it is too near to mesh borders. | |
| float | hole_size_prob_thresh_ |
| Threshold used to determine a missing region. | |
| std::vector< float > | margin_array_max_angle_ |
| std::vector< float > | margin_array_max_angle_normal_ |
| std::vector< float > | margin_array_min_angle_ |
| std::vector< float > | margin_array_min_angle_normal_ |
| float | margin_thresh_ |
| Threshold that define if a support point is near the margins. | |
| float | steep_thresh_ |
| Threshold that defines if a missing region contains a point with the most different normal. | |
| float | tangent_radius_ |
| Radius used to find tangent axis. | |
Detailed Description
template<typename PointInT, typename PointNT, typename PointOutT = ReferenceFrame>
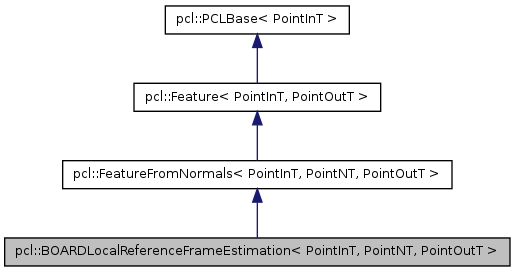
class pcl::BOARDLocalReferenceFrameEstimation< PointInT, PointNT, PointOutT >
BOARDLocalReferenceFrameEstimation implements the BOrder Aware Repeatable Directions algorithm for local reference frame estimation as described here:
- A. Petrelli, L. Di Stefano, "On the repeatability of the local reference frame for partial shape matching", 13th International Conference on Computer Vision (ICCV), 2011
Member Typedef Documentation
| typedef boost::shared_ptr<const BOARDLocalReferenceFrameEstimation<PointInT, PointNT, PointOutT> > pcl::BOARDLocalReferenceFrameEstimation< PointInT, PointNT, PointOutT >::ConstPtr |
Reimplemented from pcl::FeatureFromNormals< PointInT, PointNT, PointOutT >.
typedef Feature<PointInT, PointOutT>::PointCloudIn pcl::BOARDLocalReferenceFrameEstimation< PointInT, PointNT, PointOutT >::PointCloudIn [protected] |
Reimplemented from pcl::FeatureFromNormals< PointInT, PointNT, PointOutT >.
typedef Feature<PointInT, PointOutT>::PointCloudOut pcl::BOARDLocalReferenceFrameEstimation< PointInT, PointNT, PointOutT >::PointCloudOut [protected] |
Reimplemented from pcl::FeatureFromNormals< PointInT, PointNT, PointOutT >.
| typedef boost::shared_ptr<BOARDLocalReferenceFrameEstimation<PointInT, PointNT, PointOutT> > pcl::BOARDLocalReferenceFrameEstimation< PointInT, PointNT, PointOutT >::Ptr |
Reimplemented from pcl::FeatureFromNormals< PointInT, PointNT, PointOutT >.
Constructor & Destructor Documentation
| pcl::BOARDLocalReferenceFrameEstimation< PointInT, PointNT, PointOutT >::BOARDLocalReferenceFrameEstimation | ( | ) | [inline] |
| virtual pcl::BOARDLocalReferenceFrameEstimation< PointInT, PointNT, PointOutT >::~BOARDLocalReferenceFrameEstimation | ( | ) | [inline, virtual] |
Member Function Documentation
| bool pcl::BOARDLocalReferenceFrameEstimation< PointInT, PointNT, PointOutT >::areEquals | ( | float | val1, |
| float | val2, | ||
| float | zero_float_eps = 1E-8f |
||
| ) | const [inline, protected] |
| void pcl::BOARDLocalReferenceFrameEstimation< PointInT, PointNT, PointOutT >::computeFeature | ( | PointCloudOut & | output | ) | [protected, virtual] |
Abstract feature estimation method.
- Parameters:
-
[out] output the resultant features
Implements pcl::Feature< PointInT, PointOutT >.
| float pcl::BOARDLocalReferenceFrameEstimation< PointInT, PointNT, PointOutT >::computePointLRF | ( | const int & | index, |
| Eigen::Matrix3f & | lrf | ||
| ) | [protected] |
| void pcl::BOARDLocalReferenceFrameEstimation< PointInT, PointNT, PointOutT >::directedOrthogonalAxis | ( | Eigen::Vector3f const & | axis, |
| Eigen::Vector3f const & | axis_origin, | ||
| Eigen::Vector3f const & | point, | ||
| Eigen::Vector3f & | directed_ortho_axis | ||
| ) | [protected] |
Given an axis (with origin axis_origin), return the orthogonal axis directed to point.
- Note:
- axis must be normalized.
- Parameters:
-
[in] axis the axis [in] axis_origin the axis_origin [in] point the point towards which the resulting axis is directed [out] directed_ortho_axis the directed orthogonal axis calculated
| float pcl::BOARDLocalReferenceFrameEstimation< PointInT, PointNT, PointOutT >::getAngleBetweenUnitVectors | ( | Eigen::Vector3f const & | v1, |
| Eigen::Vector3f const & | v2, | ||
| Eigen::Vector3f const & | axis | ||
| ) | [protected] |
| int pcl::BOARDLocalReferenceFrameEstimation< PointInT, PointNT, PointOutT >::getCheckMarginArraySize | ( | ) | const [inline] |
| bool pcl::BOARDLocalReferenceFrameEstimation< PointInT, PointNT, PointOutT >::getFindHoles | ( | ) | const [inline] |
| float pcl::BOARDLocalReferenceFrameEstimation< PointInT, PointNT, PointOutT >::getHoleSizeProbThresh | ( | ) | const [inline] |
Given the angle width of a hole in the support margin, gets the minimum percentage of a circumference this angle must cover to be considered a missing region in the support and hence used for the estimation of the Reference Frame.
- Returns:
- the minimum percentage of a circumference after which a hole is considered in the calculation
| float pcl::BOARDLocalReferenceFrameEstimation< PointInT, PointNT, PointOutT >::getMarginThresh | ( | ) | const [inline] |
| float pcl::BOARDLocalReferenceFrameEstimation< PointInT, PointNT, PointOutT >::getSteepThresh | ( | ) | const [inline] |
Gets the minimum steepness that the normals of the points situated on the borders of the hole, with reference to the normal of the best point found by the algorithm, must have in order to be considered in the calculation of the Reference Frame.
- Returns:
- threshold that defines if a missing region contains a point with the most different normal.
| float pcl::BOARDLocalReferenceFrameEstimation< PointInT, PointNT, PointOutT >::getTangentRadius | ( | ) | const [inline] |
| void pcl::BOARDLocalReferenceFrameEstimation< PointInT, PointNT, PointOutT >::normalDisambiguation | ( | pcl::PointCloud< PointNT > const & | normals_cloud, |
| std::vector< int > const & | normal_indices, | ||
| Eigen::Vector3f & | normal | ||
| ) | [protected] |
Disambiguates a normal direction using adjacent normals.
- Parameters:
-
[in] normals_cloud a cloud of normals used for the calculation [in] normal_indices the indices of the normals in the cloud that should to be used for the calculation [in,out] normal the normal to disambiguate, the calculation is performed in place
| void pcl::BOARDLocalReferenceFrameEstimation< PointInT, PointNT, PointOutT >::planeFitting | ( | Eigen::Matrix< float, Eigen::Dynamic, 3 > const & | points, |
| Eigen::Vector3f & | center, | ||
| Eigen::Vector3f & | norm | ||
| ) | [protected] |
| void pcl::BOARDLocalReferenceFrameEstimation< PointInT, PointNT, PointOutT >::projectPointOnPlane | ( | Eigen::Vector3f const & | point, |
| Eigen::Vector3f const & | origin_point, | ||
| Eigen::Vector3f const & | plane_normal, | ||
| Eigen::Vector3f & | projected_point | ||
| ) | [protected] |
Given a plane (origin and normal) and a point, return the projection of x on plane.
Equivalent to vtkPlane::ProjectPoint()
- Parameters:
-
[in] point the point to project [in] origin_point a point belonging to the plane [in] plane_normal normal of the plane [out] projected_point the projection of the point on the plane
| void pcl::BOARDLocalReferenceFrameEstimation< PointInT, PointNT, PointOutT >::randomOrthogonalAxis | ( | Eigen::Vector3f const & | axis, |
| Eigen::Vector3f & | rand_ortho_axis | ||
| ) | [protected] |
| void pcl::BOARDLocalReferenceFrameEstimation< PointInT, PointNT, PointOutT >::resetData | ( | ) | [inline, protected] |
| void pcl::BOARDLocalReferenceFrameEstimation< PointInT, PointNT, PointOutT >::setCheckMarginArraySize | ( | int | size | ) | [inline] |
| void pcl::BOARDLocalReferenceFrameEstimation< PointInT, PointNT, PointOutT >::setFindHoles | ( | bool | find_holes | ) | [inline] |
| void pcl::BOARDLocalReferenceFrameEstimation< PointInT, PointNT, PointOutT >::setHoleSizeProbThresh | ( | float | prob_thresh | ) | [inline] |
Given the angle width of a hole in the support margin, sets the minimum percentage of a circumference this angle must cover to be considered a missing region in the support and hence used for the estimation of the Reference Frame.
- Parameters:
-
[in] prob_thresh the minimum percentage of a circumference after which a hole is considered in the calculation
| void pcl::BOARDLocalReferenceFrameEstimation< PointInT, PointNT, PointOutT >::setMarginThresh | ( | float | margin_thresh | ) | [inline] |
| void pcl::BOARDLocalReferenceFrameEstimation< PointInT, PointNT, PointOutT >::setSteepThresh | ( | float | steep_thresh | ) | [inline] |
Sets the minimum steepness that the normals of the points situated on the borders of the hole, with reference to the normal of the best point found by the algorithm, must have in order to be considered in the calculation of the Reference Frame.
- Parameters:
-
[in] steep_thresh threshold that defines if a missing region contains a point with the most different normal.
| void pcl::BOARDLocalReferenceFrameEstimation< PointInT, PointNT, PointOutT >::setTangentRadius | ( | float | radius | ) | [inline] |
Member Data Documentation
std::vector<bool> pcl::BOARDLocalReferenceFrameEstimation< PointInT, PointNT, PointOutT >::check_margin_array_ [private] |
int pcl::BOARDLocalReferenceFrameEstimation< PointInT, PointNT, PointOutT >::check_margin_array_size_ [private] |
bool pcl::BOARDLocalReferenceFrameEstimation< PointInT, PointNT, PointOutT >::find_holes_ [private] |
float pcl::BOARDLocalReferenceFrameEstimation< PointInT, PointNT, PointOutT >::hole_size_prob_thresh_ [private] |
std::vector<float> pcl::BOARDLocalReferenceFrameEstimation< PointInT, PointNT, PointOutT >::margin_array_max_angle_ [private] |
std::vector<float> pcl::BOARDLocalReferenceFrameEstimation< PointInT, PointNT, PointOutT >::margin_array_max_angle_normal_ [private] |
std::vector<float> pcl::BOARDLocalReferenceFrameEstimation< PointInT, PointNT, PointOutT >::margin_array_min_angle_ [private] |
std::vector<float> pcl::BOARDLocalReferenceFrameEstimation< PointInT, PointNT, PointOutT >::margin_array_min_angle_normal_ [private] |
float pcl::BOARDLocalReferenceFrameEstimation< PointInT, PointNT, PointOutT >::margin_thresh_ [private] |
float pcl::BOARDLocalReferenceFrameEstimation< PointInT, PointNT, PointOutT >::steep_thresh_ [private] |
float pcl::BOARDLocalReferenceFrameEstimation< PointInT, PointNT, PointOutT >::tangent_radius_ [private] |
The documentation for this class was generated from the following files: