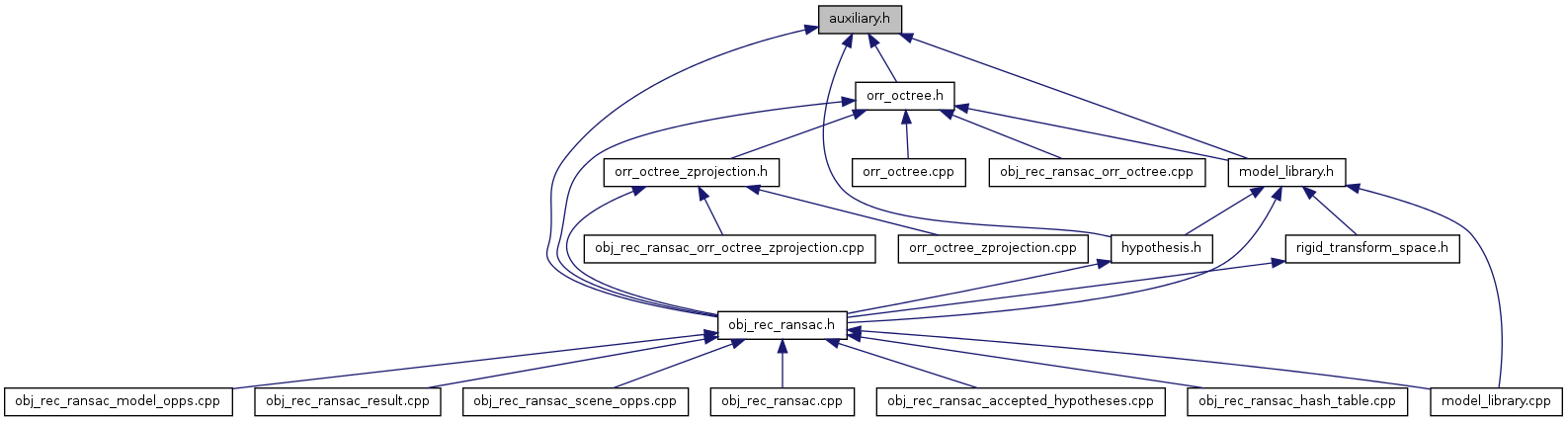
Include dependency graph for auxiliary.h:

This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | pcl |
| namespace | pcl::recognition |
| namespace | pcl::recognition::aux |
Defines | |
| #define | AUX_DEG_TO_RADIANS (3.14159265358979323846f/180.0f) |
| #define | AUX_HALF_PI 1.57079632679489661923f |
| #define | AUX_PI_FLOAT 3.14159265358979323846f |
Functions | |
| template<typename T > | |
| void | pcl::recognition::aux::add3 (T a[3], const T b[3]) |
| a += b | |
| template<typename Scalar > | |
| void | pcl::recognition::aux::array12ToMatrix4x4 (const Scalar src[12], Eigen::Matrix< Scalar, 4, 4 > &dst) |
| template<typename T > | |
| void | pcl::recognition::aux::axisAngleToRotationMatrix (const T axis_angle[3], T rotation_matrix[9]) |
| template<typename T > | |
| T | pcl::recognition::aux::clamp (T value, T min, T max) |
| template<typename T > | |
| bool | pcl::recognition::aux::compareOrderedPairs (const std::pair< T, T > &a, const std::pair< T, T > &b) |
| template<typename T > | |
| void | pcl::recognition::aux::copy3 (const T src[3], T dst[3]) |
| dst = src | |
| template<typename T > | |
| void | pcl::recognition::aux::copy3 (const T src[3], pcl::PointXYZ &dst) |
| dst = src | |
| template<typename T > | |
| void | pcl::recognition::aux::cross3 (const T v1[3], const T v2[3], T out[3]) |
| template<typename T > | |
| void | pcl::recognition::aux::diff3 (const T a[3], const T b[3], T c[3]) |
| c = a - b | |
| template<typename T > | |
| T | pcl::recognition::aux::distance3 (const T a[3], const T b[3]) |
| Returns the Euclidean distance between a and b. | |
| template<typename T > | |
| T | pcl::recognition::aux::dot3 (const T a[3], const T b[3]) |
| Returns the dot product a*b. | |
| template<typename T > | |
| T | pcl::recognition::aux::dot3 (T x, T y, T z, T u, T v, T w) |
| Returns the dot product (x, y, z)*(u, v, w) = x*u + y*v + z*w. | |
| template<typename T > | |
| void | pcl::recognition::aux::eigenMatrix3x3ToArray9RowMajor (const Eigen::Matrix< T, 3, 3 > &src, T dst[9]) |
| The method copies the input array 'src' to the eigen matrix 'dst' in row major order. dst[0] = src(0,0); dst[1] = src(0,1); dst[2] = src(0,2); dst[3] = src(1,0); dst[4] = src(1,1); dst[5] = src(1,2); dst[6] = src(2,0); dst[7] = src(2,1); dst[8] = src(2,2);. | |
| template<typename T > | |
| void | pcl::recognition::aux::expandBoundingBox (T dst[6], const T src[6]) |
| Expands the destination bounding box 'dst' such that it contains 'src'. | |
| template<typename T > | |
| void | pcl::recognition::aux::expandBoundingBoxToContainPoint (T bbox[6], const T p[3]) |
| Expands the bounding box 'bbox' such that it contains the point 'p'. | |
| template<typename T > | |
| void | pcl::recognition::aux::flip3 (T a[3]) |
| a = -a | |
| template<typename T > | |
| void | pcl::recognition::aux::identity3x3 (T m[9]) |
| Sets 'm' to the 3x3 identity matrix. | |
| template<typename T > | |
| T | pcl::recognition::aux::length3 (const T v[3]) |
| Returns the length of v. | |
| template<typename Scalar > | |
| void | pcl::recognition::aux::matrix4x4ToArray12 (const Eigen::Matrix< Scalar, 4, 4 > &src, Scalar dst[12]) |
| template<typename T > | |
| void | pcl::recognition::aux::mult3 (T *v, T scalar) |
| v = scalar*v. | |
| template<typename T > | |
| void | pcl::recognition::aux::mult3 (const T *v, T scalar, T *out) |
| out = scalar*v. | |
| template<typename T > | |
| void | pcl::recognition::aux::mult3x3 (const T m[9], const T v[3], T out[3]) |
| out = mat*v. 'm' is an 1D array of 9 elements treated as a 3x3 matrix (row major order). | |
| template<typename T > | |
| void | pcl::recognition::aux::mult3x3 (const T x[3], const T y[3], const T z[3], const T m[3][3], T out[9]) |
| template<typename T > | |
| void | pcl::recognition::aux::normalize3 (T v[3]) |
| Normalize v. | |
| template<typename T > | |
| bool | pcl::recognition::aux::pointsAreCoplanar (const T p1[3], const T n1[3], const T p2[3], const T n2[3], T max_angle) |
| Returns true if the points 'p1' and 'p2' are co-planar and false otherwise. The method assumes that 'n1' is a normal at 'p1' and 'n2' is a normal at 'p2'. 'max_angle' is the threshold used for the test. The bigger the value the larger the deviation between the normals can be which still leads to a positive test result. The angle has to be in radians. | |
| template<typename T > | |
| void | pcl::recognition::aux::projectOnPlane3 (const T x[3], const T planeNormal[3], T out[3]) |
| template<typename T > | |
| void | pcl::recognition::aux::rotationMatrixToAxisAngle (const T rotation_matrix[9], T axis[3], T &angle) |
| template<typename T > | |
| void | pcl::recognition::aux::set3 (T v[3], T value) |
| v[0] = v[1] = v[2] = value | |
| template<typename T > | |
| T | pcl::recognition::aux::sqr (T a) |
| template<typename T > | |
| T | pcl::recognition::aux::sqrDistance3 (const T a[3], const T b[3]) |
| Returns the squared Euclidean distance between a and b. | |
| template<typename T > | |
| T | pcl::recognition::aux::sqrLength3 (const T v[3]) |
| Returns the square length of v. | |
| template<typename T > | |
| void | pcl::recognition::aux::sum3 (const T a[3], const T b[3], T c[3]) |
| c = a + b | |
| template<typename T > | |
| void | pcl::recognition::aux::toEigenMatrix3x3RowMajor (const T src[9], Eigen::Matrix< T, 3, 3 > &dst) |
| The method copies the input array 'src' to the eigen matrix 'dst' in row major order. dst(0,0) = src[0]; dst(0,1) = src[1]; dst(0,2) = src[2]; dst(1,0) = src[3]; dst(1,1) = src[4]; dst(1,2) = src[5]; dst(2,0) = src[6]; dst(2,1) = src[7]; dst(2,2) = src[8];. | |
| template<class T > | |
| void | pcl::recognition::aux::transform (const T t[12], const T p[3], T out[3]) |
| The first 9 elements of 't' are treated as a 3x3 matrix (row major order) and the last 3 as a translation. First, 'p' is multiplied by that matrix and then translated. The result is saved in 'out'. | |
| template<class T > | |
| void | pcl::recognition::aux::transform (const T t[12], T x, T y, T z, T out[3]) |
| The first 9 elements of 't' are treated as a 3x3 matrix (row major order) and the last 3 as a translation. First, (x, y, z) is multiplied by that matrix and then translated. The result is saved in 'out'. | |
| template<class T > | |
| void | pcl::recognition::aux::transform (const Eigen::Matrix< T, 4, 4 > &mat, const pcl::PointXYZ &p, pcl::PointXYZ &out) |
| Compute out = (upper left 3x3 of mat)*p + last column of mat. | |
| template<class T > | |
| void | pcl::recognition::aux::transform (const T t[12], const pcl::PointXYZ &p, T out[3]) |
| The first 9 elements of 't' are treated as a 3x3 matrix (row major order) and the last 3 as a translation. First, 'p' is multiplied by that matrix and then translated. The result is saved in 'out'. | |
Define Documentation
| #define AUX_DEG_TO_RADIANS (3.14159265358979323846f/180.0f) |
Definition at line 48 of file auxiliary.h.
| #define AUX_HALF_PI 1.57079632679489661923f |
Definition at line 47 of file auxiliary.h.
| #define AUX_PI_FLOAT 3.14159265358979323846f |
Definition at line 46 of file auxiliary.h.