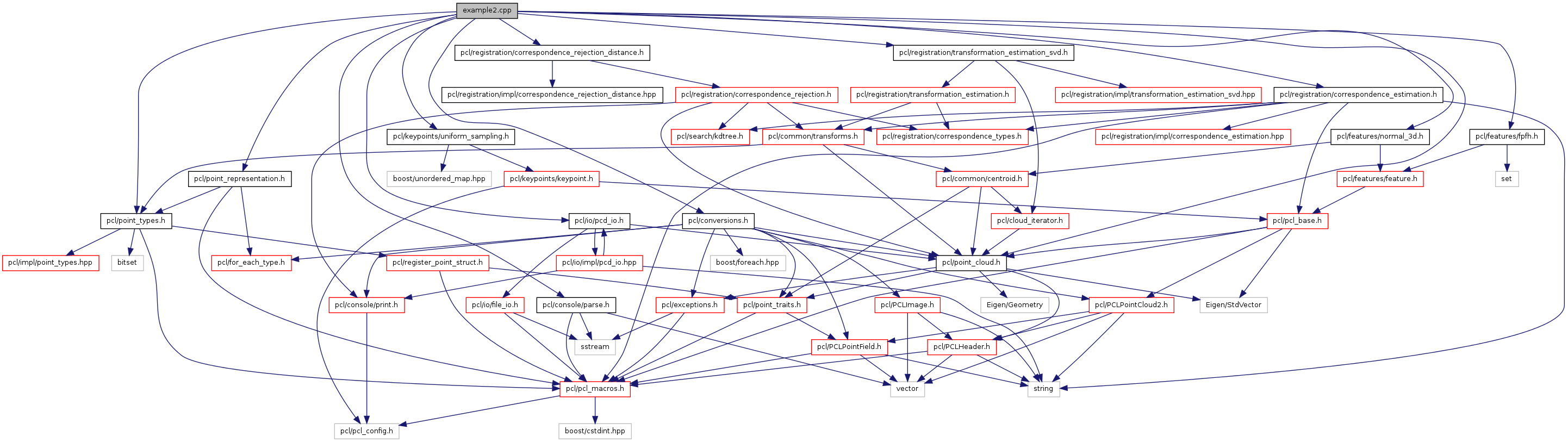
#include <pcl/console/parse.h>#include <pcl/point_types.h>#include <pcl/point_cloud.h>#include <pcl/point_representation.h>#include <pcl/io/pcd_io.h>#include <pcl/conversions.h>#include <pcl/keypoints/uniform_sampling.h>#include <pcl/features/normal_3d.h>#include <pcl/features/fpfh.h>#include <pcl/registration/correspondence_estimation.h>#include <pcl/registration/correspondence_rejection_distance.h>#include <pcl/registration/transformation_estimation_svd.h>
Include dependency graph for example2.cpp:
Go to the source code of this file.
Functions | |
| void | computeTransformation (const PointCloud< PointXYZ >::Ptr &src, const PointCloud< PointXYZ >::Ptr &tgt, Eigen::Matrix4f &transform) |
| void | estimateFPFH (const PointCloud< PointXYZ >::Ptr &src, const PointCloud< PointXYZ >::Ptr &tgt, const PointCloud< Normal >::Ptr &normals_src, const PointCloud< Normal >::Ptr &normals_tgt, const PointCloud< PointXYZ >::Ptr &keypoints_src, const PointCloud< PointXYZ >::Ptr &keypoints_tgt, PointCloud< FPFHSignature33 > &fpfhs_src, PointCloud< FPFHSignature33 > &fpfhs_tgt) |
| void | estimateKeypoints (const PointCloud< PointXYZ >::Ptr &src, const PointCloud< PointXYZ >::Ptr &tgt, PointCloud< PointXYZ > &keypoints_src, PointCloud< PointXYZ > &keypoints_tgt) |
| void | estimateNormals (const PointCloud< PointXYZ >::Ptr &src, const PointCloud< PointXYZ >::Ptr &tgt, PointCloud< Normal > &normals_src, PointCloud< Normal > &normals_tgt) |
| void | findCorrespondences (const PointCloud< FPFHSignature33 >::Ptr &fpfhs_src, const PointCloud< FPFHSignature33 >::Ptr &fpfhs_tgt, Correspondences &all_correspondences) |
| int | main (int argc, char **argv) |
| void | rejectBadCorrespondences (const CorrespondencesPtr &all_correspondences, const PointCloud< PointXYZ >::Ptr &keypoints_src, const PointCloud< PointXYZ >::Ptr &keypoints_tgt, Correspondences &remaining_correspondences) |
Variables | |
| PointCloud< PointXYZ >::Ptr | src |
| PointCloud< PointXYZ >::Ptr | tgt |
Function Documentation
| void computeTransformation | ( | const PointCloud< PointXYZ >::Ptr & | src, |
| const PointCloud< PointXYZ >::Ptr & | tgt, | ||
| Eigen::Matrix4f & | transform | ||
| ) |
Definition at line 136 of file example2.cpp.
| void estimateFPFH | ( | const PointCloud< PointXYZ >::Ptr & | src, |
| const PointCloud< PointXYZ >::Ptr & | tgt, | ||
| const PointCloud< Normal >::Ptr & | normals_src, | ||
| const PointCloud< Normal >::Ptr & | normals_tgt, | ||
| const PointCloud< PointXYZ >::Ptr & | keypoints_src, | ||
| const PointCloud< PointXYZ >::Ptr & | keypoints_tgt, | ||
| PointCloud< FPFHSignature33 > & | fpfhs_src, | ||
| PointCloud< FPFHSignature33 > & | fpfhs_tgt | ||
| ) |
Definition at line 76 of file example2.cpp.
| void estimateKeypoints | ( | const PointCloud< PointXYZ >::Ptr & | src, |
| const PointCloud< PointXYZ >::Ptr & | tgt, | ||
| PointCloud< PointXYZ > & | keypoints_src, | ||
| PointCloud< PointXYZ > & | keypoints_tgt | ||
| ) |
Definition at line 24 of file example2.cpp.
| void estimateNormals | ( | const PointCloud< PointXYZ >::Ptr & | src, |
| const PointCloud< PointXYZ >::Ptr & | tgt, | ||
| PointCloud< Normal > & | normals_src, | ||
| PointCloud< Normal > & | normals_tgt | ||
| ) |
Definition at line 50 of file example2.cpp.
| void findCorrespondences | ( | const PointCloud< FPFHSignature33 >::Ptr & | fpfhs_src, |
| const PointCloud< FPFHSignature33 >::Ptr & | fpfhs_tgt, | ||
| Correspondences & | all_correspondences | ||
| ) |
Definition at line 108 of file example2.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 182 of file example2.cpp.
| void rejectBadCorrespondences | ( | const CorrespondencesPtr & | all_correspondences, |
| const PointCloud< PointXYZ >::Ptr & | keypoints_src, | ||
| const PointCloud< PointXYZ >::Ptr & | keypoints_tgt, | ||
| Correspondences & | remaining_correspondences | ||
| ) |
Definition at line 120 of file example2.cpp.
Variable Documentation
| PointCloud<PointXYZ>::Ptr src |
Definition at line 20 of file example2.cpp.
| PointCloud<PointXYZ>::Ptr tgt |
Definition at line 20 of file example2.cpp.