User-interface to integrate a DynamicSystem, possibly over multiple stages. More...
#include <integration_algorithm.hpp>
Detailed Description
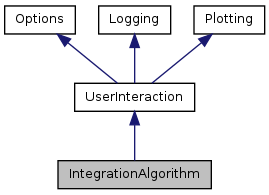
User-interface to integrate a DynamicSystem, possibly over multiple stages.
The class IntegrationAlgorithm serves as a user-interface to integrate a DynamicSystem, possibly over multiple stages.
Definition at line 56 of file integration_algorithm.hpp.
Constructor & Destructor Documentation
Default constructor.
Definition at line 48 of file integration_algorithm.cpp.
| IntegrationAlgorithm::IntegrationAlgorithm | ( | const IntegrationAlgorithm & | rhs | ) |
Copy constructor (deep copy).
Definition at line 59 of file integration_algorithm.cpp.
| IntegrationAlgorithm::~IntegrationAlgorithm | ( | ) | [virtual] |
Destructor.
Definition at line 71 of file integration_algorithm.cpp.
Member Function Documentation
| returnValue IntegrationAlgorithm::addStage | ( | const DynamicSystem & | dynamicSystem_, |
| const Grid & | stageIntervals, | ||
| const IntegratorType & | integratorType_ = INT_UNKNOWN |
||
| ) | [virtual] |
Set the Differential Equations stage by stage.
Definition at line 98 of file integration_algorithm.cpp.
| returnValue IntegrationAlgorithm::addTransition | ( | const Transition & | transition_ | ) | [virtual] |
Set the Transition stages.
Definition at line 106 of file integration_algorithm.cpp.
| returnValue IntegrationAlgorithm::clear | ( | ) | [virtual] |
Deletes all stages and transitions and resets the DynamicDiscretization.
Definition at line 112 of file integration_algorithm.cpp.
Deletes all seeds that have been set with the methods above.
This function will also give the corresponding memory free.
- Returns:
- SUCCESSFUL_RETURN
RET_NO_SEED_ALLOCATED
Definition at line 249 of file integration_algorithm.cpp.
| returnValue IntegrationAlgorithm::evaluate | ( | VariablesGrid * | x, |
| VariablesGrid * | xa, | ||
| VariablesGrid * | p, | ||
| VariablesGrid * | u, | ||
| VariablesGrid * | w | ||
| ) |
Evaluates the descretized DifferentialEquation at a specified
VariablesGrid. The results are written into the residuum of the
type VariablesGrid. This routine is for a simple evaluation only.
If sensitivities are needed use one of the routines below
instead.
- Returns:
- SUCCESSFUL_RETURN
RET_INVALID_ARGUMENTS
or a specific error message form an underlying
discretization instance.
- Parameters:
-
x differential states xa algebraic states p parameters u controls w disturbances
Definition at line 119 of file integration_algorithm.cpp.
| returnValue IntegrationAlgorithm::evaluate | ( | OCPiterate & | _iter | ) |
Definition at line 130 of file integration_algorithm.cpp.
Evaluates the sensitivities.
- Returns:
- SUCCESSFUL_RETURN
RET_NOT_FROZEN
Definition at line 256 of file integration_algorithm.cpp.
| returnValue IntegrationAlgorithm::evaluateSensitivities | ( | const BlockMatrix & | seed, |
| BlockMatrix & | hessian | ||
| ) |
Evaluates the sensitivities and the hessian.
- Returns:
- SUCCESSFUL_RETURN
RET_NOT_FROZEN
Definition at line 268 of file integration_algorithm.cpp.
Returns the result for the backward sensitivities in BlockMatrix form.
- Returns:
- SUCCESSFUL_RETURN
RET_INPUT_OUT_OF_RANGE
- Parameters:
-
D the result for the forward sensitivi- ties
Definition at line 365 of file integration_algorithm.cpp.
| returnValue IntegrationAlgorithm::getBackwardSensitivities | ( | DVector & | Dx_x0, |
| DVector & | Dx_p = emptyVector, |
||
| DVector & | Dx_u = emptyVector, |
||
| DVector & | Dx_w = emptyVector |
||
| ) | const |
Returns the result for the backward sensitivities at the time tend.
- Parameters:
-
Dx_x0 backward sensitivities w.r.t. the initial states
Dx_p backward sensitivities w.r.t. the parameters
Dx_u backward sensitivities w.r.t. the controls
Dx_w backward sensitivities w.r.t. the disturbance
- Returns:
- SUCCESSFUL_RETURN
RET_INPUT_OUT_OF_RANGE
Definition at line 372 of file integration_algorithm.cpp.
Returns the result for the forward sensitivities in BlockMatrix form.
- Returns:
- SUCCESSFUL_RETURN
RET_INPUT_OUT_OF_RANGE
- Parameters:
-
D the result for the forward sensitivi- ties
Definition at line 335 of file integration_algorithm.cpp.
| returnValue IntegrationAlgorithm::getForwardSensitivities | ( | DVector & | Dx | ) | const |
Returns the result for the forward sensitivities at the time tend.
- Parameters:
-
Dx the result for the forward sensitivities.
- Returns:
- SUCCESSFUL_RETURN
RET_INPUT_OUT_OF_RANGE
Definition at line 342 of file integration_algorithm.cpp.
| returnValue IntegrationAlgorithm::getX | ( | DVector & | xEnd | ) | const |
Returns the result for the differential states at time tend.
- Parameters:
-
xEnd the result for the states at time tend.
- Returns:
- SUCCESSFUL_RETURN
Definition at line 293 of file integration_algorithm.cpp.
| returnValue IntegrationAlgorithm::getX | ( | VariablesGrid & | X | ) | const |
Returns the requested output on the specified grid. Note
that the output X will be evaluated based on polynomial
interpolation depending on the order of the integrator.
- Parameters:
-
X the differential states on the grid.
- Returns:
- SUCCESSFUL_RETURN
RET_TRAJECTORY_NOT_FROZEN
Definition at line 313 of file integration_algorithm.cpp.
| returnValue IntegrationAlgorithm::getXA | ( | DVector & | xaEnd | ) | const |
Returns the result for the algebraic states at time tend.
- Parameters:
-
xaEnd the result for the algebraic states at time tend.
- Returns:
- SUCCESSFUL_RETURN
Definition at line 303 of file integration_algorithm.cpp.
| returnValue IntegrationAlgorithm::getXA | ( | VariablesGrid & | XA | ) | const |
Returns the requested output on the specified grid. Note
that the output X will be evaluated based on polynomial
interpolation depending on the order of the integrator.
- Parameters:
-
XA the algebraic states on the grid.
- Returns:
- SUCCESSFUL_RETURN
RET_TRAJECTORY_NOT_FROZEN
Definition at line 323 of file integration_algorithm.cpp.
| returnValue IntegrationAlgorithm::integrate | ( | VariablesGrid * | x, |
| VariablesGrid * | xa, | ||
| VariablesGrid * | p, | ||
| VariablesGrid * | u, | ||
| VariablesGrid * | w | ||
| ) |
- Parameters:
-
x differential states xa algebraic states p parameters u controls w disturbances
Definition at line 140 of file integration_algorithm.cpp.
| returnValue IntegrationAlgorithm::integrate | ( | double | t0, |
| double | tend, | ||
| const DVector & | x0, | ||
| const DVector & | xa = emptyVector, |
||
| const DVector & | p = emptyVector, |
||
| const DVector & | u = emptyVector, |
||
| const DVector & | w = emptyVector |
||
| ) |
Starts the integration of the right hand side at time t0.
If neither the maximum number of allowed iteration is
exceeded nor any other error occurs the functions stops the
integration at time tend.
- Returns:
- SUCCESFUL_RETURN or
a error message that depends on the specific
integration routine. (cf. the corresponding header
file that implements the integration routine)
- Parameters:
-
t0 the start time tend the end time x0 the initial state xa the initial algebraic state p the parameters u the controls w the disturbance
Definition at line 151 of file integration_algorithm.cpp.
| returnValue IntegrationAlgorithm::integrate | ( | const Grid & | t, |
| const DVector & | x0, | ||
| const DVector & | xa = emptyVector, |
||
| const DVector & | p = emptyVector, |
||
| const DVector & | u = emptyVector, |
||
| const DVector & | w = emptyVector |
||
| ) |
Starts the integration of the right hand side at time t0.
If neither the maximum number of allowed iteration is
exceeded nor any other error occurs the functions stops the
integration at time tend.
In addition, results at intermediate grid points can be
stored. Note that these grid points are for storage only and
have nothing to do the integrator steps.
- Returns:
- SUCCESFUL_RETURN or
a error message that depends on the specific
integration routine. (cf. the corresponding header
file that implements the integration routine)
- Parameters:
-
t the grid [t0,tend] x0 the initial state xa the initial algebraic state p the parameters u the controls w the disturbance
Definition at line 172 of file integration_algorithm.cpp.
Evaluates the sensitivities.
- Returns:
- SUCCESSFUL_RETURN
RET_NOT_FROZEN
Definition at line 262 of file integration_algorithm.cpp.
| returnValue IntegrationAlgorithm::integrateSensitivities | ( | const BlockMatrix & | seed, |
| BlockMatrix & | hessian | ||
| ) |
Evaluates the sensitivities and the hessian.
- Returns:
- SUCCESSFUL_RETURN
RET_NOT_FROZEN
Definition at line 274 of file integration_algorithm.cpp.
| BooleanType IntegrationAlgorithm::isAffine | ( | ) | const |
Definition at line 287 of file integration_algorithm.cpp.
| IntegrationAlgorithm & IntegrationAlgorithm::operator= | ( | const IntegrationAlgorithm & | rhs | ) |
Assignment operator (deep copy).
Definition at line 78 of file integration_algorithm.cpp.
| returnValue IntegrationAlgorithm::setBackwardSeed | ( | const BlockMatrix & | seed | ) |
Define a backward seed in form of a block matrix.
Here, the block matrix should have N block columns,
where N is the number of points of the union grid.
The i-th column is associated with the i-th grid
point in the union grid. Note that the directions
can itself be organized in sub-blocks as long as
all dimensions fit together.
- Returns:
- SUCCESFUL_RETURN
RET_INPUT_OUT_OF_RANGE
- Parameters:
-
seed the seed matrix
Definition at line 224 of file integration_algorithm.cpp.
| returnValue IntegrationAlgorithm::setBackwardSeed | ( | const DVector & | seed | ) |
Define a backward seed
- Returns:
- SUCCESFUL_RETURN
RET_INPUT_OUT_OF_RANGE
- Parameters:
-
seed the backward seed
Definition at line 231 of file integration_algorithm.cpp.
| returnValue IntegrationAlgorithm::setForwardSeed | ( | const BlockMatrix & | xSeed_, |
| const BlockMatrix & | pSeed_ = emptyBlockMatrix, |
||
| const BlockMatrix & | uSeed_ = emptyBlockMatrix, |
||
| const BlockMatrix & | wSeed_ = emptyBlockMatrix |
||
| ) |
Define a forward seed in form of a block matrix.
Here, the block matrix should have N block rows,
where N is the number of points of the union grid.
The i-th row is associated with the i-th grid
point in the union grid. Note that the direction
can itself be organized in sub-blocks as long as
all dimensions fit together.
- Returns:
- SUCCESFUL RETURN
RET_INPUT_OUT_OF_RANGE
- Parameters:
-
xSeed_ the seed in x-direction pSeed_ the seed in p-direction uSeed_ the seed in u-direction wSeed_ the seed in w-direction
Definition at line 193 of file integration_algorithm.cpp.
| returnValue IntegrationAlgorithm::setForwardSeed | ( | const DVector & | xSeed, |
| const DVector & | pSeed = emptyVector, |
||
| const DVector & | uSeed = emptyVector, |
||
| const DVector & | wSeed = emptyVector |
||
| ) |
Define a forward seed matrix.
- Returns:
- SUCCESFUL RETURN
RET_INPUT_OUT_OF_RANGE
- Parameters:
-
xSeed the seed w.r.t states pSeed the seed w.r.t parameters uSeed the seed w.r.t controls wSeed the seed w.r.t disturbances
Definition at line 203 of file integration_algorithm.cpp.
Defines the first order backward seed to be
a unit matrix.
- Returns:
- SUCCESFUL_RETURN
RET_INPUT_OUT_OF_RANGE
Definition at line 242 of file integration_algorithm.cpp.
Defines the first order forward seed to be
the unit-directions matrix.
- Returns:
- SUCCESFUL_RETURN
RET_INPUT_OUT_OF_RANGE
Definition at line 218 of file integration_algorithm.cpp.
| returnValue IntegrationAlgorithm::setupLogging | ( | ) | [protected, virtual] |
Prototype member function for setting-up the logging information at initialization of derived classes.
- Returns:
- SUCCESSFUL_RETURN
Reimplemented from Logging.
Definition at line 451 of file integration_algorithm.cpp.
| returnValue IntegrationAlgorithm::setupOptions | ( | ) | [protected, virtual] |
Prototype member function for setting-up the option list(s) at initialization of derived classes.
- Returns:
- SUCCESSFUL_RETURN
Reimplemented from Options.
Definition at line 422 of file integration_algorithm.cpp.
Definition at line 281 of file integration_algorithm.cpp.
Member Data Documentation
ShootingMethod* IntegrationAlgorithm::integrationMethod [protected] |
Definition at line 380 of file integration_algorithm.hpp.
OCPiterate IntegrationAlgorithm::iter [protected] |
Definition at line 381 of file integration_algorithm.hpp.
The documentation for this class was generated from the following files: