#include <float.h>#include <sensor_msgs/PointCloud2.h>#include "octomap/octomap.h"#include "pcl_to_octree/octree/OcTreePCL.h"#include "pcl_to_octree/octree/OcTreeNodePCL.h"#include "pcl_to_octree/octree/OcTreeServerPCL.h"#include "pcl/io/io.h"#include <pcl/io/pcd_io.h>#include <pcl_cloud_algos/pcl_cloud_algos_point_types.h>#include <visualization_msgs/MarkerArray.h>#include <pcl_ros/publisher.h>#include "pcl/kdtree/tree_types.h"#include "pcl/kdtree/kdtree.h"#include "pcl/kdtree/kdtree_flann.h"#include "pcl/kdtree/organized_data.h"#include "pcl/features/feature.h"#include <pcl_cloud_algos/cloud_algos.h>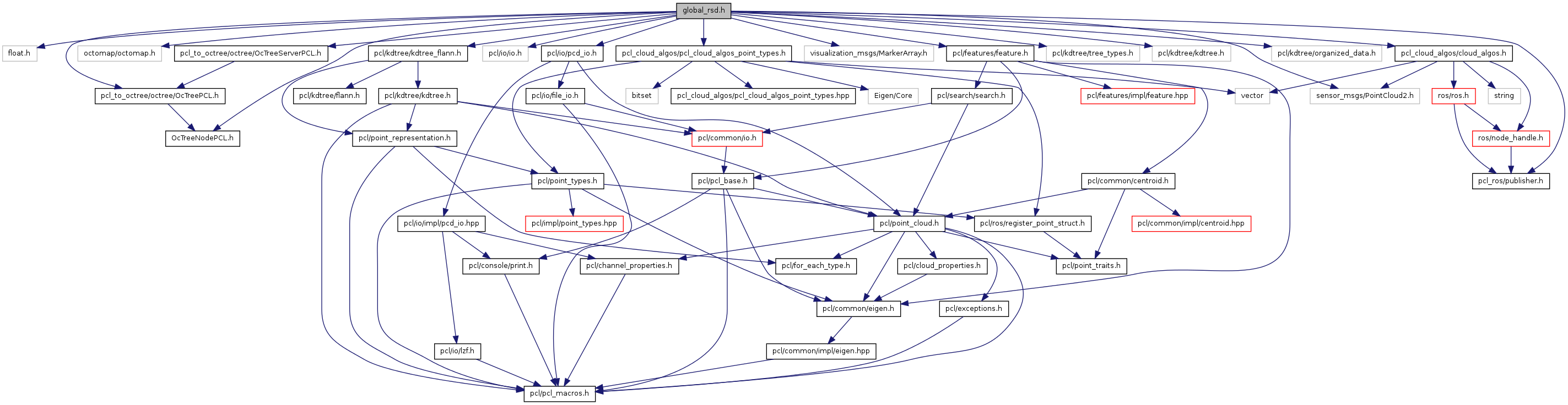
Go to the source code of this file.
Classes | |
| class | pcl_cloud_algos::GlobalRSD |
| struct | pcl_cloud_algos::IntersectedLeaf |
| struct | pcl_cloud_algos::GlobalRSD::QueryPoint |
Namespaces | |
| namespace | pcl_cloud_algos |
Defines | |
| #define | _sqr(c) ((c)*(c)) |
| #define | _sqr_dist(a, b) ( _sqr(((a).x())-((b).x())) + _sqr(((a).y())-((b).y())) + _sqr(((a).z())-((b).z())) ) |
| #define | NR_CLASS 5 |
Functions | |
| bool | pcl_cloud_algos::histogramElementCompare (const std::pair< int, IntersectedLeaf > &p1, const std::pair< int, IntersectedLeaf > &p2) |
| #define _sqr_dist | ( | a, | |
| b | |||
| ) | ( _sqr(((a).x())-((b).x())) + _sqr(((a).y())-((b).y())) + _sqr(((a).z())-((b).z())) ) |
Definition at line 42 of file global_rsd.h.
| #define NR_CLASS 5 |
Definition at line 38 of file global_rsd.h.

