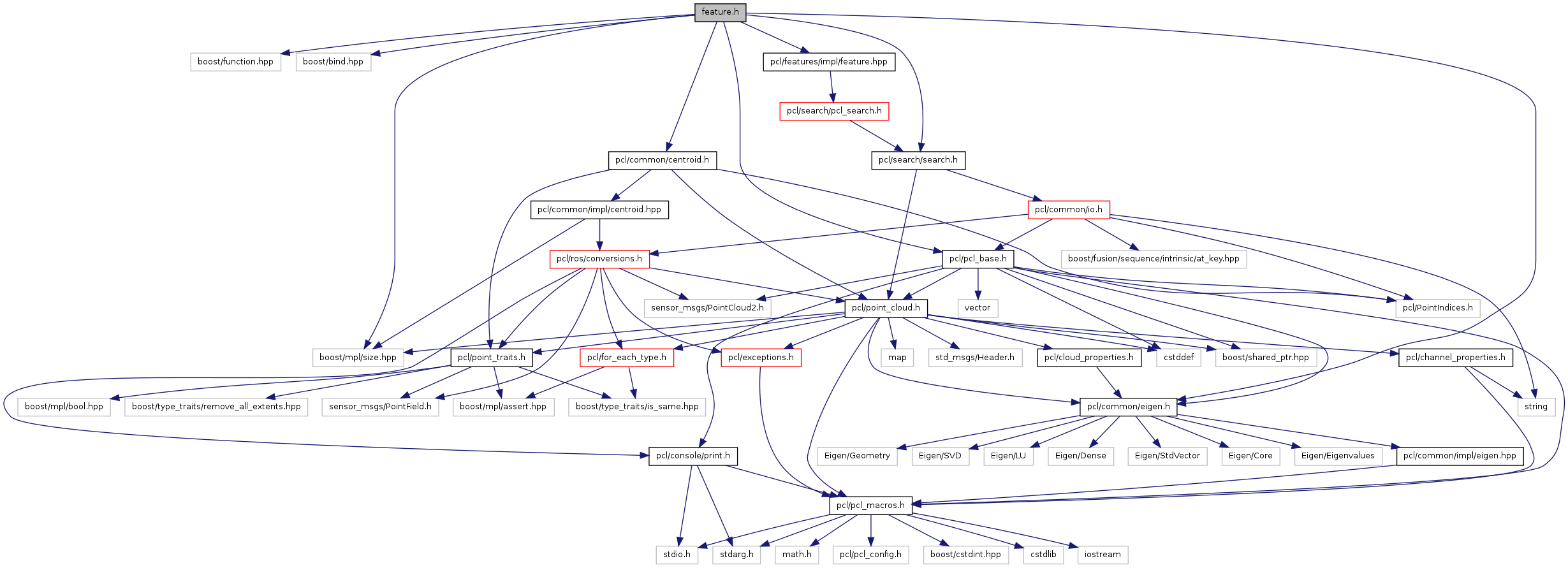
#include <boost/function.hpp>#include <boost/bind.hpp>#include <boost/mpl/size.hpp>#include <pcl/pcl_base.h>#include <pcl/common/eigen.h>#include <pcl/common/centroid.h>#include <pcl/search/search.h>#include <pcl/features/impl/feature.hpp>
Include dependency graph for feature.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | pcl::Feature< PointInT, PointOutT > |
| Feature represents the base feature class. Some generic 3D operations that are applicable to all features are defined here as static methods. More... | |
| class | pcl::FeatureFromLabels< PointInT, PointLT, PointOutT > |
| class | pcl::FeatureFromNormals< PointInT, PointNT, PointOutT > |
| class | pcl::FeatureWithLocalReferenceFrames< PointInT, PointRFT > |
| FeatureWithLocalReferenceFrames provides a public interface for descriptor extractor classes which need a local reference frame at each input keypoint. More... | |
Namespaces | |
| namespace | pcl |
Functions | |
| void | pcl::solvePlaneParameters (const Eigen::Matrix3f &covariance_matrix, const Eigen::Vector4f &point, Eigen::Vector4f &plane_parameters, float &curvature) |
| Solve the eigenvalues and eigenvectors of a given 3x3 covariance matrix, and estimate the least-squares plane normal and surface curvature. | |
| void | pcl::solvePlaneParameters (const Eigen::Matrix3f &covariance_matrix, float &nx, float &ny, float &nz, float &curvature) |
| Solve the eigenvalues and eigenvectors of a given 3x3 covariance matrix, and estimate the least-squares plane normal and surface curvature. | |