Proposal Density for non-linear systems with additive Gaussian Noise (using a EKF Filter) More...
#include <EKF_proposaldensity.h>
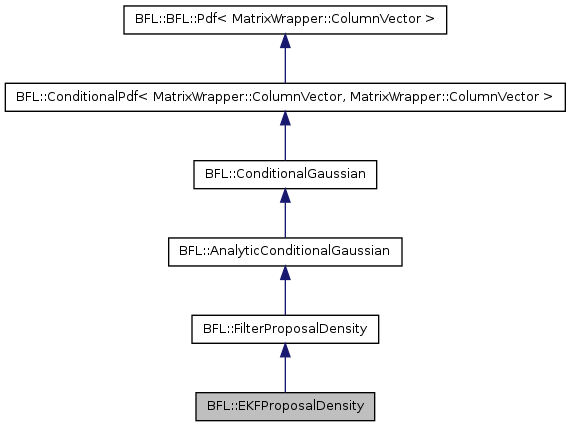
Inheritance diagram for BFL::EKFProposalDensity:
Public Member Functions | |
| EKFProposalDensity (AnalyticSystemModelGaussianUncertainty *SysModel, AnalyticMeasurementModelGaussianUncertainty *MeasModel) | |
| Constructor. | |
| virtual | ~EKFProposalDensity () |
| Destructor. | |
Detailed Description
Proposal Density for non-linear systems with additive Gaussian Noise (using a EKF Filter)
Calculates an importance density for all systems of the form
![\[ x_k = f(x_{k-1}[,u_k]) + v_k, \quad v_k \sim N(0, \Sigma_v) \]](form_49.png)
![\[ z_k = h(x_k[,s_k]) + w_k, \quad w_k \sim N(0, \Sigma_w) \]](form_50.png)
This means all systems with a system equation and measurement equation that use a AnalyticConditionalGaussian Class.
Definition at line 36 of file EKF_proposaldensity.h.
Constructor & Destructor Documentation
| BFL::EKFProposalDensity::EKFProposalDensity | ( | AnalyticSystemModelGaussianUncertainty * | SysModel, |
| AnalyticMeasurementModelGaussianUncertainty * | MeasModel | ||
| ) |
Constructor.
- Parameters:
-
SysModel MeasModel
| virtual BFL::EKFProposalDensity::~EKFProposalDensity | ( | ) | [virtual] |
Destructor.
The documentation for this class was generated from the following file: