Abstract class representing an interface for Bayesian Filters. More...
#include <filter.h>
Public Member Functions | |
| Filter (Pdf< StateVar > *prior) | |
| Constructor. | |
| Filter (const Filter< StateVar, MeasVar > &filt) | |
| copy constructor | |
| virtual Pdf< StateVar > * | PostGet () |
| Get Posterior density. | |
| virtual void | Reset (Pdf< StateVar > *prior) |
| Reset Filter. | |
| int | TimeStepGet () const |
| Get current time. | |
| virtual bool | Update (SystemModel< StateVar > *const sysmodel, const StateVar &u, MeasurementModel< MeasVar, StateVar > *const measmodel, const MeasVar &z, const StateVar &s) |
| Full Update (system with inputs/sensing params) | |
| virtual bool | Update (SystemModel< StateVar > *const sysmodel, MeasurementModel< MeasVar, StateVar > *const measmodel, const MeasVar &z, const StateVar &s) |
| Full Update (system without inputs, with sensing params) | |
| virtual bool | Update (SystemModel< StateVar > *const sysmodel, MeasurementModel< MeasVar, StateVar > *const measmodel, const MeasVar &z) |
| Full Update (system without inputs/sensing params) | |
| virtual bool | Update (SystemModel< StateVar > *const sysmodel, const StateVar &u, MeasurementModel< MeasVar, StateVar > *const measmodel, const MeasVar &z) |
| Full Update (system with inputs, without sensing params) | |
| virtual bool | Update (SystemModel< StateVar > *const sysmodel, const StateVar &u) |
| System Update (system with inputs) | |
| virtual bool | Update (SystemModel< StateVar > *const sysmodel) |
| System Update (system without inputs) | |
| virtual bool | Update (MeasurementModel< MeasVar, StateVar > *const measmodel, const MeasVar &z, const StateVar &s) |
| Measurement Update (system with "sensing params") | |
| virtual bool | Update (MeasurementModel< MeasVar, StateVar > *const measmodel, const MeasVar &z) |
| Measurement Update (system without "sensing params") | |
| virtual | ~Filter () |
| destructor | |
Protected Member Functions | |
| virtual bool | UpdateInternal (SystemModel< StateVar > *const sysmodel, const StateVar &u, MeasurementModel< MeasVar, StateVar > *const measmodel, const MeasVar &z, const StateVar &s)=0 |
| Actual implementation of Update, varies along filters. | |
Protected Attributes | |
| Pdf< StateVar > * | _post |
| Pointer to the Posterior Pdf. | |
| Pdf< StateVar > * | _prior |
| prior Pdf | |
| int | _timestep |
| Represents the current timestep of the filter. | |
Detailed Description
template<typename StateVar, typename MeasVar>
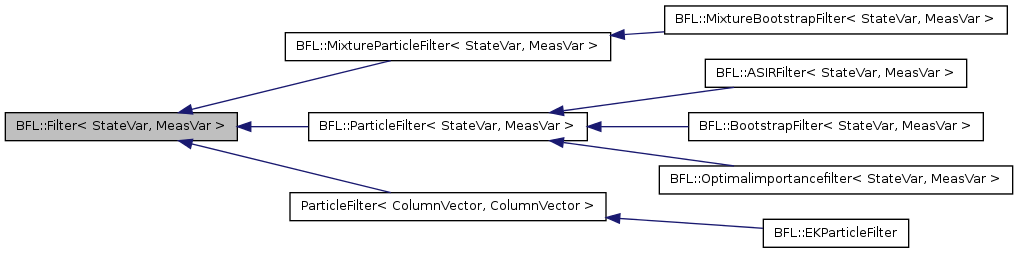
class BFL::Filter< StateVar, MeasVar >
Abstract class representing an interface for Bayesian Filters.
This is the Abstract interface class that defines the interface of Bayesian filters. These filters are all related to i) a System Model, ii) a Measurement Model and iii) a Prior density reflecting the subjective belief of the person applying the filter BEFORE getting sensor or any other form of information about the modeled system.
This class is the base class for particle filters, kalman filters, ...
This class is a template class with 2 templates. In this way it allows filtering for "semi-discrete" models, eg. models with a fixed number of states (discrete states) but with continuous observations, as needed in Automatic Speech Recognition.
- See also:
- Pdf SystemModel MeasurementModel ConditionalPdf
- Bug:
- For now, due to a "bug" (= non-existence of a feature :-) in the ConditionalPdf class, STATES AND INPUTS MUST BE OF THE SAME TYPE (both discrete, or both continuous! This means that you can use this class for the following model types:
- States, inputs and measurements continuous (most frequently used?)
- States and inputs continous, Measurements discrete
- States and inputs discrete, Measurements continous
- States, inputs and measurements discrete
StateVar represents the nature of the states and inputs MeasVar represents the nature of the measurements
BEWARE: The order of the template arguments is reversed with respect to the notation used in "measurementmodel.h"
Constructor & Destructor Documentation
| BFL::Filter< SVar, MVar >::Filter | ( | Pdf< SVar > * | prior | ) |
| BFL::Filter< SVar, MVar >::Filter | ( | const Filter< SVar, MVar > & | filt | ) |
| BFL::Filter< SVar, MVar >::~Filter | ( | ) | [virtual] |
destructor
Definition at line 32 of file filter.cpp.
Member Function Documentation
| Pdf< SVar > * BFL::Filter< SVar, MVar >::PostGet | ( | ) | [virtual] |
Get Posterior density.
Get the current Posterior density
- Returns:
- a pointer to the current posterior
Reimplemented in BFL::MixtureParticleFilter< StateVar, MeasVar >, BFL::ParticleFilter< StateVar, MeasVar >, BFL::ParticleFilter< ColumnVector, ColumnVector >, BFL::HistogramFilter< MeasVar >, and BFL::KalmanFilter.
Definition at line 126 of file filter.cpp.
| void BFL::Filter< SVar, MVar >::Reset | ( | Pdf< SVar > * | prior | ) | [virtual] |
Reset Filter.
Definition at line 41 of file filter.cpp.
| int BFL::Filter< SVar, MVar >::TimeStepGet | ( | ) | const |
Get current time.
Get the current time of the filter
- Returns:
- the current timestep
Definition at line 49 of file filter.cpp.
| bool BFL::Filter< SVar, MVar >::Update | ( | SystemModel< SVar > *const | sysmodel, |
| const SVar & | u, | ||
| MeasurementModel< MVar, SVar > *const | measmodel, | ||
| const MVar & | z, | ||
| const SVar & | s | ||
| ) | [virtual] |
| bool BFL::Filter< SVar, MVar >::Update | ( | SystemModel< SVar > *const | sysmodel, |
| MeasurementModel< MVar, SVar > *const | measmodel, | ||
| const MVar & | z, | ||
| const SVar & | s | ||
| ) | [virtual] |
| bool BFL::Filter< SVar, MVar >::Update | ( | SystemModel< SVar > *const | sysmodel, |
| MeasurementModel< MVar, SVar > *const | measmodel, | ||
| const MVar & | z | ||
| ) | [virtual] |
| bool BFL::Filter< SVar, MVar >::Update | ( | SystemModel< SVar > *const | sysmodel, |
| const SVar & | u, | ||
| MeasurementModel< MVar, SVar > *const | measmodel, | ||
| const MVar & | z | ||
| ) | [virtual] |
| bool BFL::Filter< SVar, MVar >::Update | ( | SystemModel< SVar > *const | sysmodel, |
| const SVar & | u | ||
| ) | [virtual] |
| bool BFL::Filter< SVar, MVar >::Update | ( | SystemModel< SVar > *const | sysmodel | ) | [virtual] |
| bool BFL::Filter< SVar, MVar >::Update | ( | MeasurementModel< MVar, SVar > *const | measmodel, |
| const MVar & | z, | ||
| const SVar & | s | ||
| ) | [virtual] |
| bool BFL::Filter< SVar, MVar >::Update | ( | MeasurementModel< MVar, SVar > *const | measmodel, |
| const MVar & | z | ||
| ) | [virtual] |
| virtual bool BFL::Filter< StateVar, MeasVar >::UpdateInternal | ( | SystemModel< StateVar > *const | sysmodel, |
| const StateVar & | u, | ||
| MeasurementModel< MeasVar, StateVar > *const | measmodel, | ||
| const MeasVar & | z, | ||
| const StateVar & | s | ||
| ) | [protected, pure virtual] |
Actual implementation of Update, varies along filters.
- Parameters:
-
sysmodel pointer to the used system model u input param for proposal density measmodel pointer to the used measurementmodel z measurement param for proposal density s sensor param for proposal density
Implemented in BFL::ParticleFilter< StateVar, MeasVar >, BFL::KalmanFilter, BFL::MixtureParticleFilter< StateVar, MeasVar >, BFL::HistogramFilter< MeasVar >, BFL::ASIRFilter< StateVar, MeasVar >, BFL::BootstrapFilter< StateVar, MeasVar >, and BFL::MixtureBootstrapFilter< StateVar, MeasVar >.
Member Data Documentation
Pdf<StateVar>* BFL::Filter< StateVar, MeasVar >::_post [protected] |
Pointer to the Posterior Pdf.
The Posterior Pdf represents the subjective belief of the person applying the filter AFTER processing inputs and measurements. A filter does not maintain the beliefs at all timesteps t, since this leads to non-constant (or ever growing if you prefer) memory requirements. However, it is possible, to copy the Posterior density at all timesteps in your application by means of the PostGet() member function
- See also:
- PostGet()
int BFL::Filter< StateVar, MeasVar >::_timestep [protected] |
The documentation for this class was generated from the following files: