Regular grasp performer: moveArm to beginning of approach, execute approach, grasp, execute lift. More...
#include <approach_lift_grasp.h>
Protected Member Functions | |
| virtual object_manipulation_msgs::GraspResult | approachAndGrasp (const object_manipulation_msgs::PickupGoal &pickup_goal, const object_manipulation_msgs::Grasp &grasp, GraspExecutionInfo &execution_info) |
| virtual object_manipulation_msgs::GraspResult | lift (const object_manipulation_msgs::PickupGoal &pickup_goal, const object_manipulation_msgs::Grasp &grasp, GraspExecutionInfo &execution_info) |
| virtual void | performGrasp (const object_manipulation_msgs::PickupGoal &pickup_goal, const object_manipulation_msgs::Grasp &grasp, GraspExecutionInfo &execution_info) |
| Attempts to perform a single grasp. | |
| virtual object_manipulation_msgs::GraspResult | retreat (const object_manipulation_msgs::PickupGoal &pickup_goal, const object_manipulation_msgs::Grasp &grasp, GraspExecutionInfo &execution_info) |
Detailed Description
Regular grasp performer: moveArm to beginning of approach, execute approach, grasp, execute lift.
Definition at line 216 of file approach_lift_grasp.h.
Member Function Documentation
| object_manipulation_msgs::GraspResult object_manipulator::StandardGraspPerformer::approachAndGrasp | ( | const object_manipulation_msgs::PickupGoal & | pickup_goal, |
| const object_manipulation_msgs::Grasp & | grasp, | ||
| GraspExecutionInfo & | execution_info | ||
| ) | [protected, virtual] |
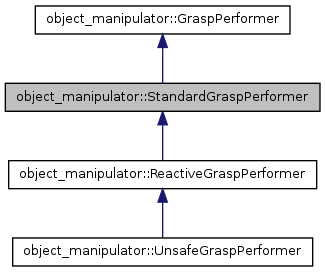
Reimplemented in object_manipulator::UnsafeGraspPerformer, and object_manipulator::ReactiveGraspPerformer.
Definition at line 424 of file approach_lift_grasp.cpp.
| object_manipulation_msgs::GraspResult object_manipulator::StandardGraspPerformer::lift | ( | const object_manipulation_msgs::PickupGoal & | pickup_goal, |
| const object_manipulation_msgs::Grasp & | grasp, | ||
| GraspExecutionInfo & | execution_info | ||
| ) | [protected, virtual] |
Reimplemented in object_manipulator::ReactiveGraspPerformer.
Definition at line 456 of file approach_lift_grasp.cpp.
| void object_manipulator::StandardGraspPerformer::performGrasp | ( | const object_manipulation_msgs::PickupGoal & | pickup_goal, |
| const object_manipulation_msgs::Grasp & | grasp, | ||
| GraspExecutionInfo & | execution_info | ||
| ) | [protected, virtual] |
Attempts to perform a single grasp.
Implements object_manipulator::GraspPerformer.
Definition at line 394 of file approach_lift_grasp.cpp.
| object_manipulation_msgs::GraspResult object_manipulator::StandardGraspPerformer::retreat | ( | const object_manipulation_msgs::PickupGoal & | pickup_goal, |
| const object_manipulation_msgs::Grasp & | grasp, | ||
| GraspExecutionInfo & | execution_info | ||
| ) | [protected, virtual] |
Definition at line 471 of file approach_lift_grasp.cpp.
The documentation for this class was generated from the following files: