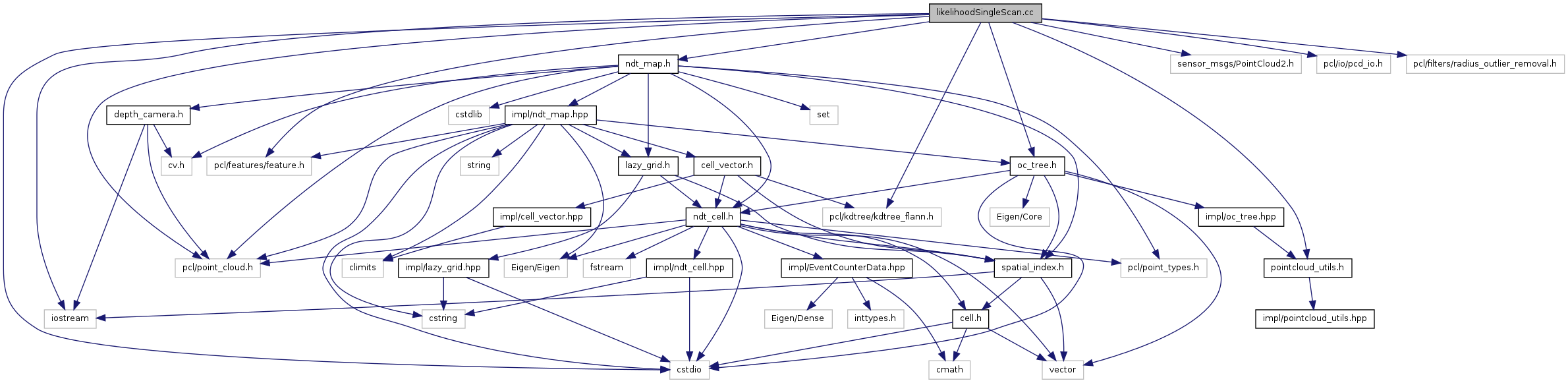
#include <ndt_map.h>#include <oc_tree.h>#include <pointcloud_utils.h>#include "pcl/point_cloud.h"#include "sensor_msgs/PointCloud2.h"#include "pcl/io/pcd_io.h"#include "pcl/features/feature.h"#include <cstdio>#include <pcl/filters/radius_outlier_removal.h>#include <iostream>#include <pcl/kdtree/kdtree_flann.h>
Include dependency graph for likelihoodSingleScan.cc:
Go to the source code of this file.
Classes | |
| class | OneTestResult |
| class | Tester |
Functions | |
| int | main (int argc, char **argv) |
Variables | |
| static int | ctr = 0 |
Function Documentation
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 238 of file likelihoodSingleScan.cc.
Variable Documentation
int ctr = 0 [static] |
Definition at line 236 of file likelihoodSingleScan.cc.