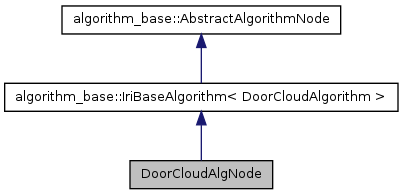
IRI ROS Specific Algorithm Class. More...
#include <door_cloud_alg_node.h>
Public Member Functions | |
| DoorCloudAlgNode (void) | |
| Constructor. | |
| ~DoorCloudAlgNode (void) | |
| Destructor. | |
Protected Member Functions | |
| void | addNodeDiagnostics (void) |
| node add diagnostics | |
| visualization_msgs::Marker | ArrowMarker (std_msgs::Header header, geometry_msgs::Pose pose, int alpha, int color, const char arrow_tag[]) |
| Arrow Marker. | |
| pcl::PointCloud< pcl::PointXYZ > | filterCloud (pcl::PointCloud< pcl::PointXYZ > raw_cloud, float Lowx, float Uppx, float Lowy, float Uppy, float Lowz, float Uppz, bool negative_limits) |
| volume filter for a point cloud | |
| void | mainNodeThread (void) |
| main node thread | |
| void | node_config_update (Config &config, uint32_t level) |
| dynamic reconfigure server callback | |
| boost::tuple< pcl::PointCloud < pcl::PointXYZ > , pcl::PointIndices::Ptr, pcl::ModelCoefficients::Ptr > | planeFit (pcl::PointCloud< pcl::PointXYZ > raw_cloud) |
| RANSAC plane fit. | |
| geometry_msgs::Quaternion | quaternionFromVectors (tf::Vector3 vector_1, tf::Vector3 vector_2) |
| Quaterion from vectors. | |
Private Member Functions | |
| void | door_action_start_callback (const std_msgs::Int8::ConstPtr &msg) |
| void | door_centroid_callback (const geometry_msgs::PoseStamped::ConstPtr &msg) |
| void | handle_location_callback (const geometry_msgs::PoseStamped::ConstPtr &msg) |
| void | points_callback (const sensor_msgs::PointCloud2::ConstPtr &msg) |
Private Attributes | |
| int | captured_closed |
| int | captured_open |
| sensor_msgs::PointCloud2 | closed_door_cloud |
| ros::Publisher | closed_door_cloud_publisher_ |
| ros::Publisher | closed_door_marker_publisher_ |
| pcl::PointCloud< pcl::PointXYZ > | cloud |
| pcl::PointCloud< pcl::PointXYZ > | cloud_filtered |
| pcl::PointCloud< pcl::PointXYZ > | cloud_filtered_left |
| pcl::PointCloud< pcl::PointXYZ > | cloud_filtered_right |
| pcl::PointCloud< pcl::PointXYZ > | cloud_filtered_top |
| pcl::PointCloud< pcl::PointXYZ > | cloud_plane |
| CMutex | door_action_start_mutex_ |
| ros::Subscriber | door_action_start_subscriber_ |
| CMutex | door_centroid_mutex_ |
| ros::Publisher | door_centroid_publisher_ |
| ros::Subscriber | door_centroid_subscriber_ |
| ros::Publisher | door_handle_publisher_ |
| boost::tuple< pcl::PointCloud < pcl::PointXYZ > , pcl::PointIndices::Ptr, pcl::ModelCoefficients::Ptr > | door_plane |
| CMutex | handle_location_mutex_ |
| ros::Subscriber | handle_location_subscriber_ |
| float | lower_x |
| float | lower_y |
| float | lower_z |
| visualization_msgs::Marker | marker |
| visualization_msgs::Marker | Marker_msg_ |
| bool | no_simulator |
| sensor_msgs::PointCloud2 | open_door_cloud |
| ros::Publisher | open_door_cloud_publisher_ |
| ros::Publisher | open_door_marker_publisher_ |
| geometry_msgs::Quaternion | orient |
| sensor_msgs::PointCloud2 | PointCloud2_msg_ |
| CMutex | points_mutex_ |
| ros::Subscriber | points_subscriber_ |
| geometry_msgs::PoseStamped | poses |
| geometry_msgs::PoseStamped | PoseStamped_msg_ |
| int | start |
| std::string | tf_original_frame |
| float | upper_x |
| float | upper_y |
| float | upper_z |
| float | w_closed |
| float | w_open |
| float | x_closed |
| float | x_left |
| float | x_open |
| float | x_right |
| float | y_closed |
| float | y_open |
| float | y_top |
| float | z_closed |
| float | z_open |
Detailed Description
IRI ROS Specific Algorithm Class.
Definition at line 64 of file door_cloud_alg_node.h.
Constructor & Destructor Documentation
| DoorCloudAlgNode::DoorCloudAlgNode | ( | void | ) |
Constructor.
This constructor initializes specific class attributes and all ROS communications variables to enable message exchange.
Definition at line 3 of file door_cloud_alg_node.cpp.
| DoorCloudAlgNode::~DoorCloudAlgNode | ( | void | ) |
Destructor.
This destructor frees all necessary dynamic memory allocated within this this class.
Definition at line 44 of file door_cloud_alg_node.cpp.
Member Function Documentation
| void DoorCloudAlgNode::addNodeDiagnostics | ( | void | ) | [protected, virtual] |
node add diagnostics
In this abstract function additional ROS diagnostics applied to the specific algorithms may be added.
Implements algorithm_base::IriBaseAlgorithm< DoorCloudAlgorithm >.
Definition at line 412 of file door_cloud_alg_node.cpp.
| visualization_msgs::Marker DoorCloudAlgNode::ArrowMarker | ( | std_msgs::Header | header, |
| geometry_msgs::Pose | pose, | ||
| int | alpha, | ||
| int | color, | ||
| const char | arrow_tag[] | ||
| ) | [protected] |
Arrow Marker.
Construct an arrow marker for plane orientation visualization
Definition at line 507 of file door_cloud_alg_node.cpp.
| void DoorCloudAlgNode::door_action_start_callback | ( | const std_msgs::Int8::ConstPtr & | msg | ) | [private] |
Definition at line 67 of file door_cloud_alg_node.cpp.
| void DoorCloudAlgNode::door_centroid_callback | ( | const geometry_msgs::PoseStamped::ConstPtr & | msg | ) | [private] |
Definition at line 94 of file door_cloud_alg_node.cpp.
| pcl::PointCloud< pcl::PointXYZ > DoorCloudAlgNode::filterCloud | ( | pcl::PointCloud< pcl::PointXYZ > | raw_cloud, |
| float | Lowx, | ||
| float | Uppx, | ||
| float | Lowy, | ||
| float | Uppy, | ||
| float | Lowz, | ||
| float | Uppz, | ||
| bool | negative_limits | ||
| ) | [protected] |
volume filter for a point cloud
Removes points outisde x and z limits
Definition at line 423 of file door_cloud_alg_node.cpp.
| void DoorCloudAlgNode::handle_location_callback | ( | const geometry_msgs::PoseStamped::ConstPtr & | msg | ) | [private] |
Definition at line 120 of file door_cloud_alg_node.cpp.
| void DoorCloudAlgNode::mainNodeThread | ( | void | ) | [protected, virtual] |
main node thread
This is the main thread node function. Code written here will be executed in every node loop while the algorithm is on running state. Loop frequency can be tuned by modifying loop_rate attribute.
Here data related to the process loop or to ROS topics (mainly data structs related to the MSG and SRV files) must be updated. ROS publisher objects must publish their data in this process. ROS client servers may also request data to the corresponding server topics.
Implements algorithm_base::IriBaseAlgorithm< DoorCloudAlgorithm >.
Definition at line 49 of file door_cloud_alg_node.cpp.
| void DoorCloudAlgNode::node_config_update | ( | Config & | config, |
| uint32_t | level | ||
| ) | [protected, virtual] |
dynamic reconfigure server callback
This method is called whenever a new configuration is received through the dynamic reconfigure. The derivated generic algorithm class must implement it.
- Parameters:
-
config an object with new configuration from all algorithm parameters defined in the config file. level integer referring the level in which the configuration has been changed.
Implements algorithm_base::IriBaseAlgorithm< DoorCloudAlgorithm >.
Definition at line 403 of file door_cloud_alg_node.cpp.
| boost::tuple< pcl::PointCloud< pcl::PointXYZ >, pcl::PointIndices::Ptr, pcl::ModelCoefficients::Ptr > DoorCloudAlgNode::planeFit | ( | pcl::PointCloud< pcl::PointXYZ > | raw_cloud | ) | [protected] |
RANSAC plane fit.
Returns plane coefficients, inliers and fitted plane point cloud in a tuple
Definition at line 458 of file door_cloud_alg_node.cpp.
| void DoorCloudAlgNode::points_callback | ( | const sensor_msgs::PointCloud2::ConstPtr & | msg | ) | [private] |
Definition at line 144 of file door_cloud_alg_node.cpp.
| geometry_msgs::Quaternion DoorCloudAlgNode::quaternionFromVectors | ( | tf::Vector3 | vector_1, |
| tf::Vector3 | vector_2 | ||
| ) | [protected] |
Quaterion from vectors.
Return rotation quaternion between two unit vectors
Definition at line 491 of file door_cloud_alg_node.cpp.
Member Data Documentation
int DoorCloudAlgNode::captured_closed [private] |
Definition at line 109 of file door_cloud_alg_node.h.
int DoorCloudAlgNode::captured_open [private] |
Definition at line 108 of file door_cloud_alg_node.h.
sensor_msgs::PointCloud2 DoorCloudAlgNode::closed_door_cloud [private] |
Definition at line 139 of file door_cloud_alg_node.h.
Definition at line 74 of file door_cloud_alg_node.h.
Definition at line 76 of file door_cloud_alg_node.h.
pcl::PointCloud<pcl::PointXYZ> DoorCloudAlgNode::cloud [private] |
Definition at line 129 of file door_cloud_alg_node.h.
pcl::PointCloud<pcl::PointXYZ> DoorCloudAlgNode::cloud_filtered [private] |
Definition at line 130 of file door_cloud_alg_node.h.
pcl::PointCloud<pcl::PointXYZ> DoorCloudAlgNode::cloud_filtered_left [private] |
Definition at line 131 of file door_cloud_alg_node.h.
pcl::PointCloud<pcl::PointXYZ> DoorCloudAlgNode::cloud_filtered_right [private] |
Definition at line 132 of file door_cloud_alg_node.h.
pcl::PointCloud<pcl::PointXYZ> DoorCloudAlgNode::cloud_filtered_top [private] |
Definition at line 133 of file door_cloud_alg_node.h.
pcl::PointCloud<pcl::PointXYZ> DoorCloudAlgNode::cloud_plane [private] |
Definition at line 134 of file door_cloud_alg_node.h.
CMutex DoorCloudAlgNode::door_action_start_mutex_ [private] |
Definition at line 85 of file door_cloud_alg_node.h.
Definition at line 83 of file door_cloud_alg_node.h.
CMutex DoorCloudAlgNode::door_centroid_mutex_ [private] |
Definition at line 91 of file door_cloud_alg_node.h.
Definition at line 72 of file door_cloud_alg_node.h.
Definition at line 89 of file door_cloud_alg_node.h.
Definition at line 78 of file door_cloud_alg_node.h.
boost::tuple<pcl::PointCloud<pcl::PointXYZ>, pcl::PointIndices::Ptr, pcl::ModelCoefficients::Ptr> DoorCloudAlgNode::door_plane [private] |
Definition at line 135 of file door_cloud_alg_node.h.
CMutex DoorCloudAlgNode::handle_location_mutex_ [private] |
Definition at line 94 of file door_cloud_alg_node.h.
Definition at line 92 of file door_cloud_alg_node.h.
float DoorCloudAlgNode::lower_x [private] |
Definition at line 122 of file door_cloud_alg_node.h.
float DoorCloudAlgNode::lower_y [private] |
Definition at line 123 of file door_cloud_alg_node.h.
float DoorCloudAlgNode::lower_z [private] |
Definition at line 124 of file door_cloud_alg_node.h.
visualization_msgs::Marker DoorCloudAlgNode::marker [private] |
Definition at line 140 of file door_cloud_alg_node.h.
visualization_msgs::Marker DoorCloudAlgNode::Marker_msg_ [private] |
Definition at line 71 of file door_cloud_alg_node.h.
bool DoorCloudAlgNode::no_simulator [private] |
Definition at line 105 of file door_cloud_alg_node.h.
sensor_msgs::PointCloud2 DoorCloudAlgNode::open_door_cloud [private] |
Definition at line 138 of file door_cloud_alg_node.h.
Definition at line 68 of file door_cloud_alg_node.h.
Definition at line 70 of file door_cloud_alg_node.h.
geometry_msgs::Quaternion DoorCloudAlgNode::orient [private] |
Definition at line 137 of file door_cloud_alg_node.h.
sensor_msgs::PointCloud2 DoorCloudAlgNode::PointCloud2_msg_ [private] |
Definition at line 69 of file door_cloud_alg_node.h.
CMutex DoorCloudAlgNode::points_mutex_ [private] |
Definition at line 88 of file door_cloud_alg_node.h.
Definition at line 86 of file door_cloud_alg_node.h.
geometry_msgs::PoseStamped DoorCloudAlgNode::poses [private] |
Definition at line 136 of file door_cloud_alg_node.h.
geometry_msgs::PoseStamped DoorCloudAlgNode::PoseStamped_msg_ [private] |
Definition at line 73 of file door_cloud_alg_node.h.
int DoorCloudAlgNode::start [private] |
Definition at line 110 of file door_cloud_alg_node.h.
std::string DoorCloudAlgNode::tf_original_frame [private] |
Definition at line 128 of file door_cloud_alg_node.h.
float DoorCloudAlgNode::upper_x [private] |
Definition at line 125 of file door_cloud_alg_node.h.
float DoorCloudAlgNode::upper_y [private] |
Definition at line 126 of file door_cloud_alg_node.h.
float DoorCloudAlgNode::upper_z [private] |
Definition at line 127 of file door_cloud_alg_node.h.
float DoorCloudAlgNode::w_closed [private] |
Definition at line 121 of file door_cloud_alg_node.h.
float DoorCloudAlgNode::w_open [private] |
Definition at line 117 of file door_cloud_alg_node.h.
float DoorCloudAlgNode::x_closed [private] |
Definition at line 118 of file door_cloud_alg_node.h.
float DoorCloudAlgNode::x_left [private] |
Definition at line 111 of file door_cloud_alg_node.h.
float DoorCloudAlgNode::x_open [private] |
Definition at line 113 of file door_cloud_alg_node.h.
float DoorCloudAlgNode::x_right [private] |
Definition at line 112 of file door_cloud_alg_node.h.
float DoorCloudAlgNode::y_closed [private] |
Definition at line 119 of file door_cloud_alg_node.h.
float DoorCloudAlgNode::y_open [private] |
Definition at line 115 of file door_cloud_alg_node.h.
float DoorCloudAlgNode::y_top [private] |
Definition at line 114 of file door_cloud_alg_node.h.
float DoorCloudAlgNode::z_closed [private] |
Definition at line 120 of file door_cloud_alg_node.h.
float DoorCloudAlgNode::z_open [private] |
Definition at line 116 of file door_cloud_alg_node.h.
The documentation for this class was generated from the following files: