#include <footstep_planner/helper.h>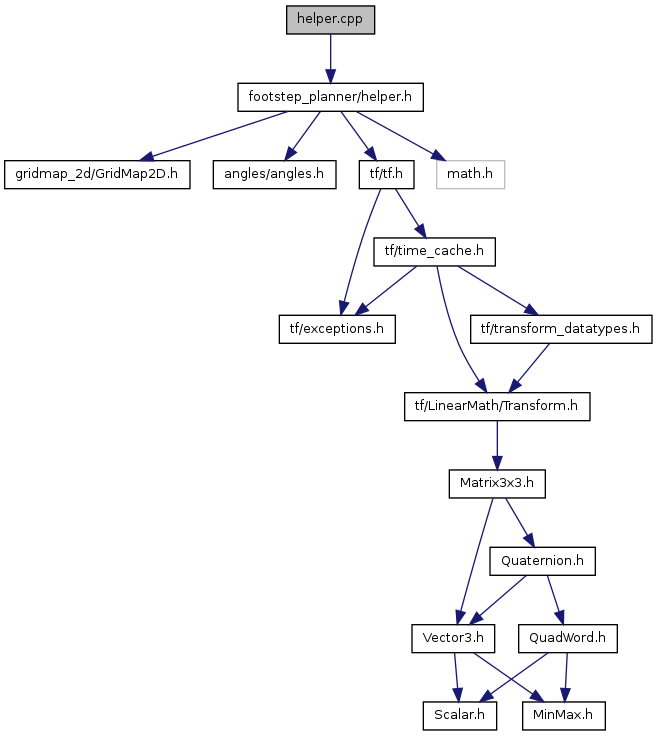
Go to the source code of this file.
Namespaces | |
| namespace | footstep_planner |
Functions | |
| bool | footstep_planner::collision_check (double x, double y, double theta, double height, double width, int accuracy, const gridmap_2d::GridMap2D &distance_map) |
| Checks if a footstep (represented by its center and orientation) collides with an obstacle. The check is done by recursively testing if either the circumcircle of the foot, the inner circle of the foot or the area in between has an appropriate distance to the nearest obstacle. | |
| bool | footstep_planner::pointWithinPolygon (int x, int y, const std::vector< std::pair< int, int > > &edges) |
| Crossing number method to determine whether a point lies within a polygon or not. | |

