#include <control_mode_attitude.h>
Public Member Functions | |
| ControlModeAttitude (string mode_name="attitude") | |
| void | onInit () |
Private Member Functions | |
| void | applyStepInputs (control_mode_outputPtr &control_out) |
| void | controlModeCmdCallback (const control_mode_cmdConstPtr &msg) |
| void | outputControl () |
| void | reportStatusTimerCallback (const ros::TimerEvent &e) |
Private Attributes | |
| AttitudeController | att_control |
| int | step_input_joystick_pitch_axis |
| int | step_input_joystick_roll_axis |
| double | step_input_magnitude |
| bool | step_input_mode_enabled |
Detailed Description
Definition at line 52 of file control_mode_attitude.h.
Constructor & Destructor Documentation
| flyer_controller::ControlModeAttitude::ControlModeAttitude | ( | string | mode_name = "attitude" | ) | [inline] |
Definition at line 65 of file control_mode_attitude.h.
Member Function Documentation
| void flyer_controller::ControlModeAttitude::applyStepInputs | ( | control_mode_outputPtr & | control_out | ) | [private] |
| void flyer_controller::ControlModeAttitude::controlModeCmdCallback | ( | const control_mode_cmdConstPtr & | msg | ) | [private, virtual] |
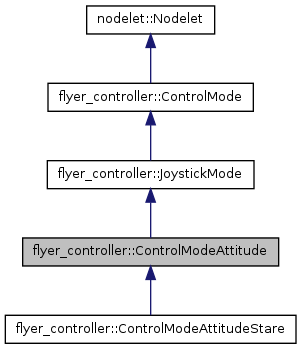
Reimplemented from flyer_controller::ControlMode.
Definition at line 141 of file control_mode_attitude.cpp.
| void flyer_controller::ControlModeAttitude::onInit | ( | ) | [virtual] |
Reimplemented from flyer_controller::JoystickMode.
Definition at line 38 of file control_mode_attitude.cpp.
| void flyer_controller::ControlModeAttitude::outputControl | ( | ) | [private, virtual] |
Reimplemented from flyer_controller::ControlMode.
Definition at line 70 of file control_mode_attitude.cpp.
| void flyer_controller::ControlModeAttitude::reportStatusTimerCallback | ( | const ros::TimerEvent & | e | ) | [private, virtual] |
Reimplemented from flyer_controller::ControlMode.
Definition at line 128 of file control_mode_attitude.cpp.
Member Data Documentation
Definition at line 62 of file control_mode_attitude.h.
Definition at line 58 of file control_mode_attitude.h.
Definition at line 57 of file control_mode_attitude.h.
double flyer_controller::ControlModeAttitude::step_input_magnitude [private] |
Definition at line 59 of file control_mode_attitude.h.
Definition at line 56 of file control_mode_attitude.h.
The documentation for this class was generated from the following files: